PROJECT CATEGORY: CIVIL
JOIN OUR PRESENTATION
ABOUT OUR PROJECT
As self-driving cars begin to integrate into society, civil engineers take on the responsibility of creating cities, spaces, and infrastructure that maximize the public benefit of this new technology. We are looking down the road to simulate scenarios in which autonomous vehicles (AV’s) acting as shared rideshares have replaced personal vehicles in downtown Calgary, creating a new transportation system of Autonomous Mobility on Demand (AMoD). Our key focus throughout this project is to design a city street network optimized for sustainability, livability, and equity to build a more active, healthy, and human-centric city. Using a transportation modelling software, MATSim, we are able to model various cases of AV’s travelling throughout Calgary’s city center during peak periods and observe their effects through several parameters; volume, speed, trip duration, and vehicle capacity. By doing so, we are able to test the effects of possible street networks made up of custom-designed shared streets and pick-off drop-off (PUDO) points that sustains a reliable mobility-on-demand network while reclaiming street space for fairer, more sustainable and more human-centric communities.

To learn more about our technical design process, view our video to see the simulations in action
OUR TEAM MEMBERS

CURBSIDE DESIGN
Three possible designs for PUDO points in future streets were designed and qualitatively analyzed to determine their capacity to improve quality of life through several parameters detailed below. Conceptual designs were drafted and displayed below
Design 1: Parking Lanes as PUDO Lanes

The first and simplest design is to repurpose parking lanes as “PUDO Lanes” where parking is not allowed but pick up drop off for shared autonomous vehicles is. This lane could be converted to pedestrian or social space when not needed by the AMoD system.
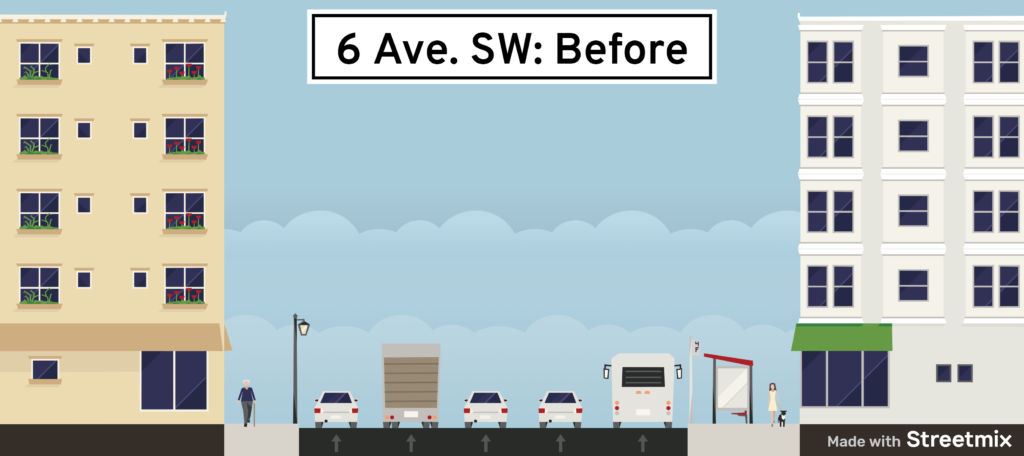
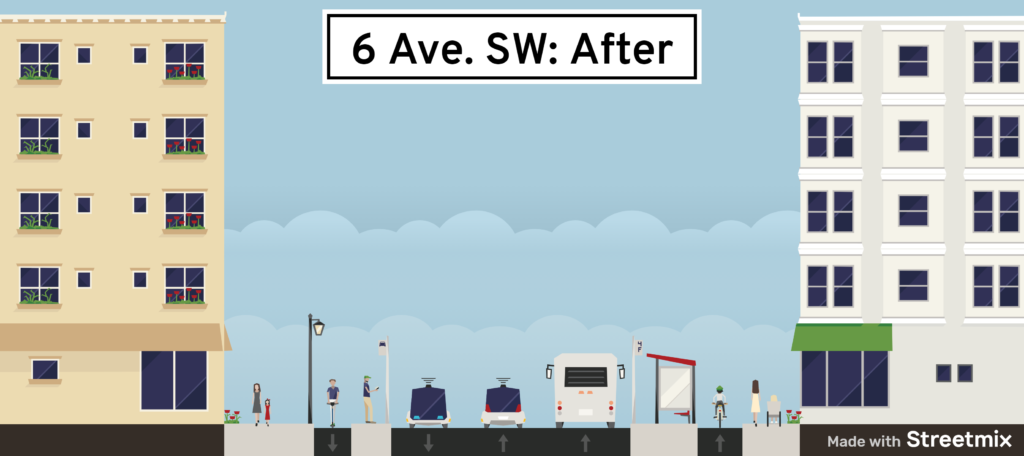
Design 2: Multi-Modal Corridors with PUDO Points
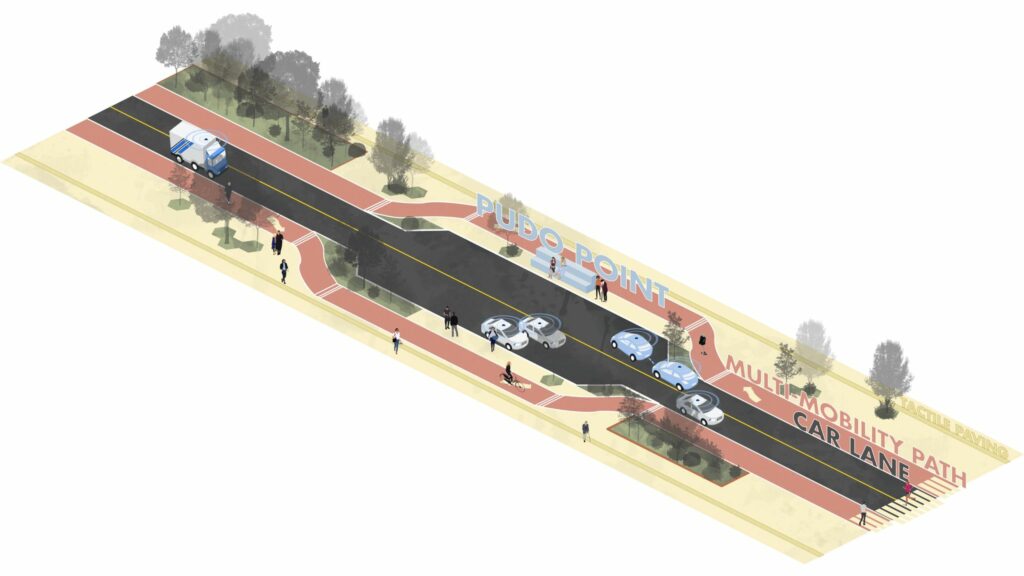
This is a Multi-Modal Corridor, a street redesign that will encourage walking and other sustainable modes of travel like bicycling and e-scootering that are more affordable and accessible than cars. Firstly, the parking lanes will be converted to permanent curb space, except for a section in the middle of the street which will become a PUDO point for the entire street. A multi-mobility path will be added where bikes, skateboards, etc. will be able to travel without sharing the space with pedestrians or motorized vehicles. Finally, driving lanes will be shortened due to the lesser need for autonomous vehicles for navigation and tactile paving for blind people, as well as other accessibility improvements will be included.
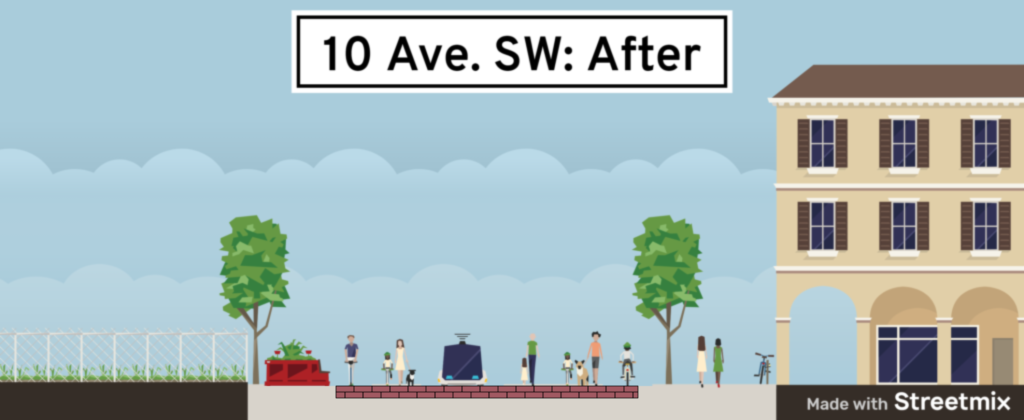
Design 3.1: Shared Streets

The concept of Shared Streets develops the human-centric philosophy of streets to the fullest, by placing pedestrian right-of-way over all other users. Curbs and the roadway are merged into one street that is made with brickwork or stone pavement that intuitively indicates that this street is intended for humans walking rather than motorized transports.
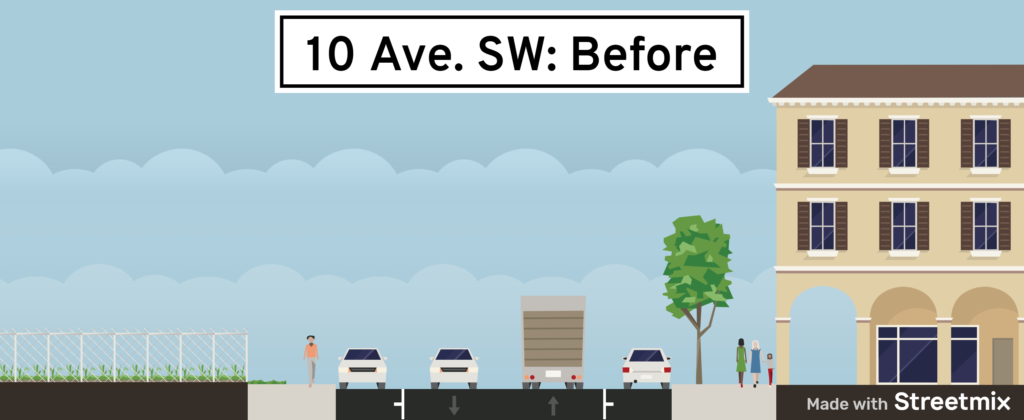
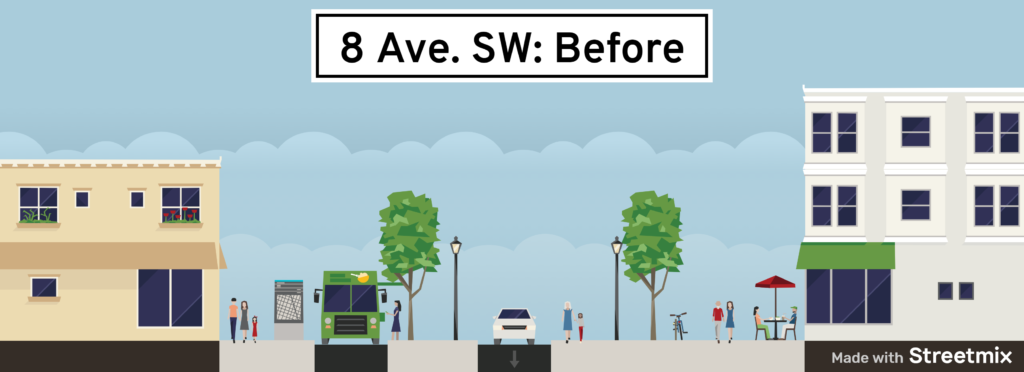
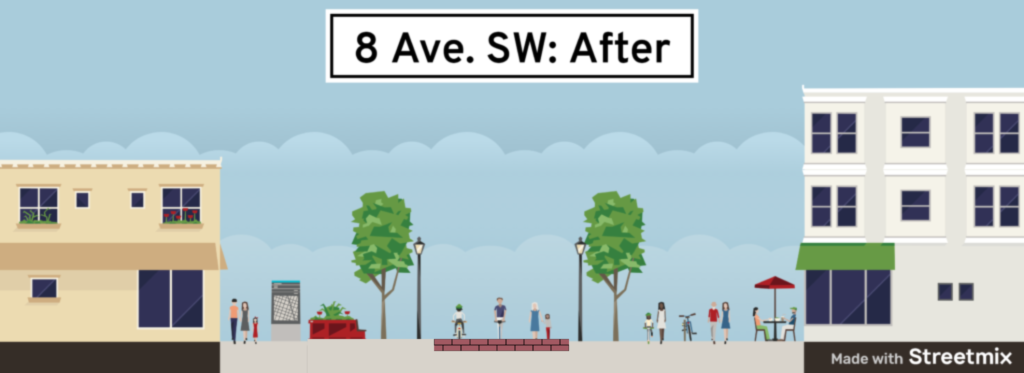
Design 3.2: Parkways
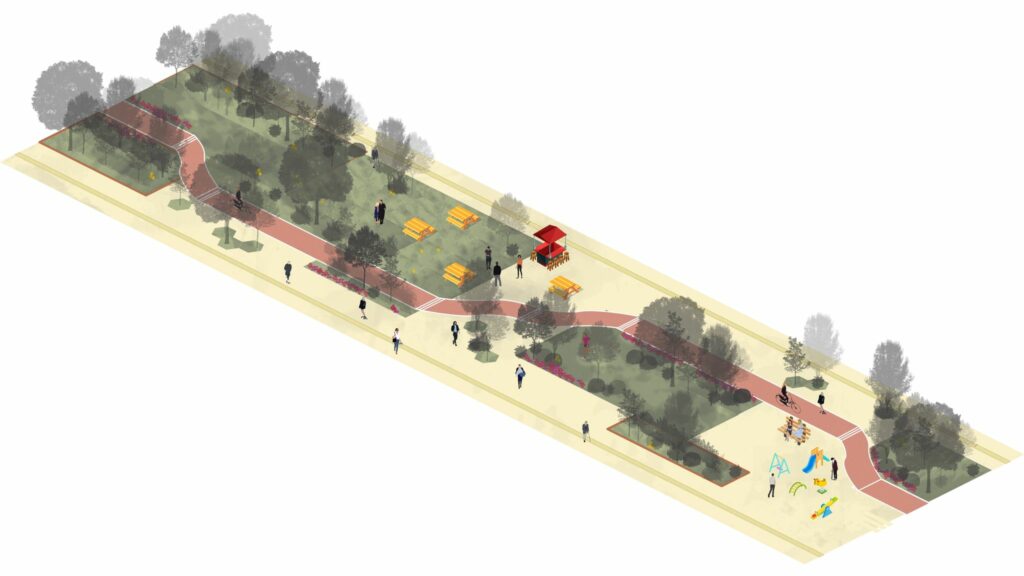
The idea of making some shared streets entirely vehicle-free was explored during our simulation process (after our qualitative analysis), as a way to fully turn over a street to human-centered activity. A parkway essentially turns a street that sees very low use into a park made of mostly green space and a path for active modes for travel.
Qualitative Analysis
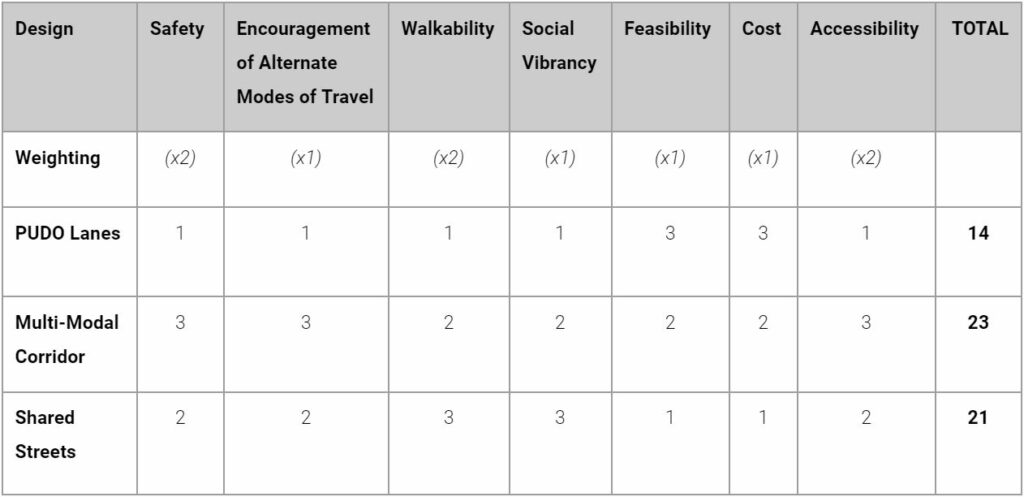
To determine which design would be optimal, design parameters that represent the sustainability, livability and equity goals of our project were formulated so that the PUDO street designs can be qualitatively analyzed using a weighted decision matrix.
Although the Multi-Modal Corridor is the optimal PUDO design, it was determined that the Shared Street design can be implemented depending on the future traffic flow and context. A shared street design will significantly decrease the flow of traffic as a result of slower speeds required for the safety of its users especially for those using non-vehicular modes of travel. On the other hand, multi-mobility corridors will be able to handle higher speeds, therefore higher flows, due to separated right of way for vehicles and non-vehicular modes of travel.
STREET NETWORK DESIGN
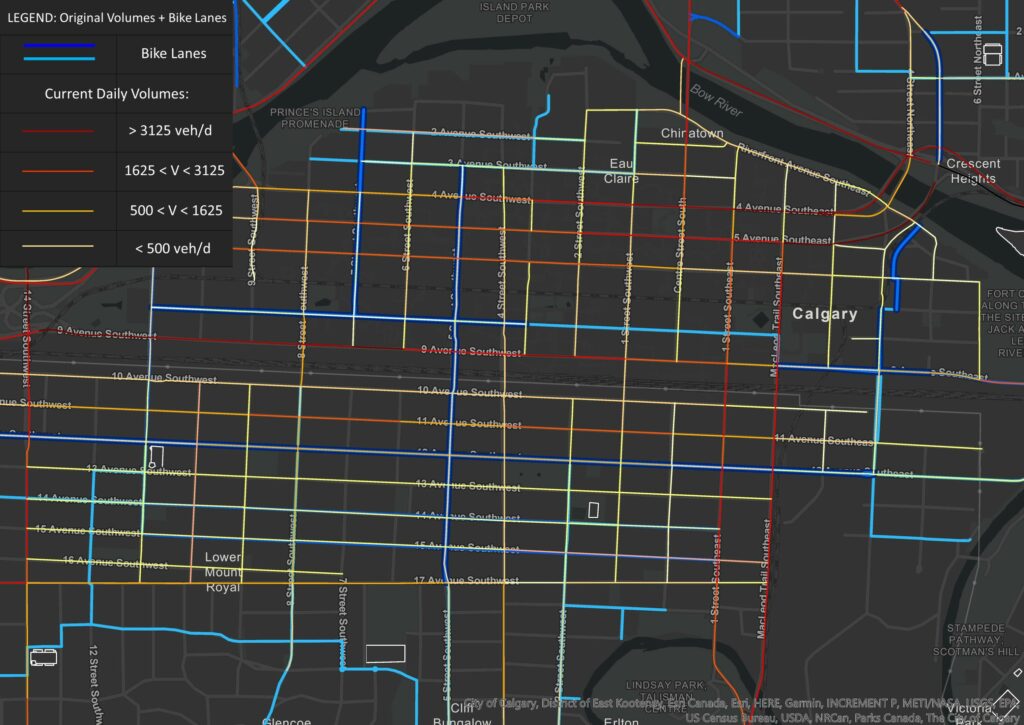
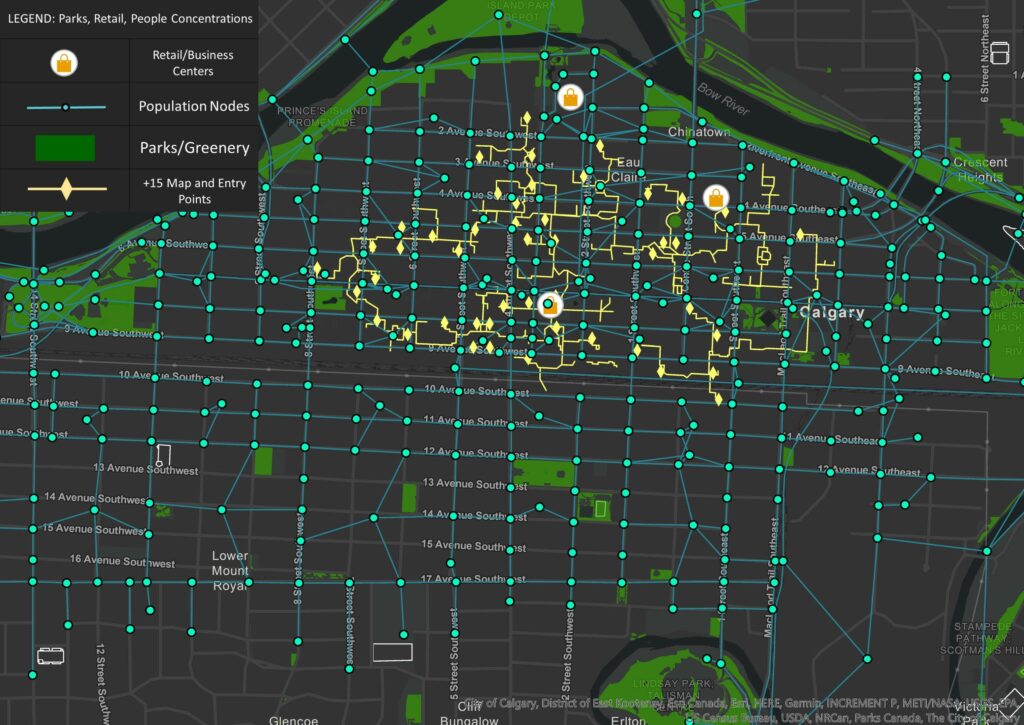
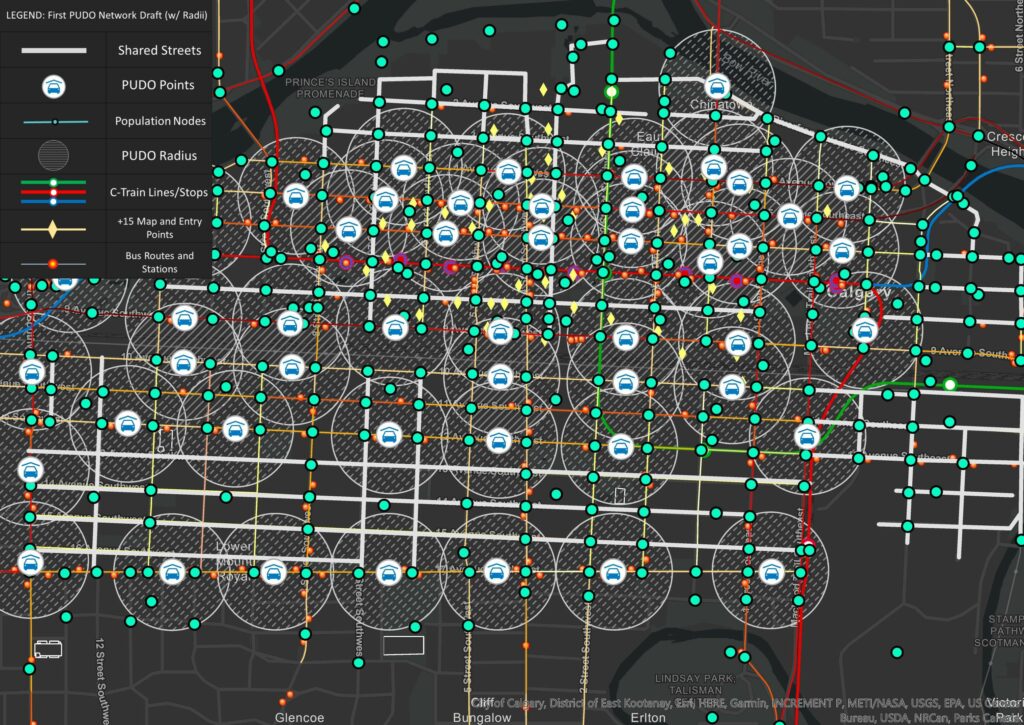
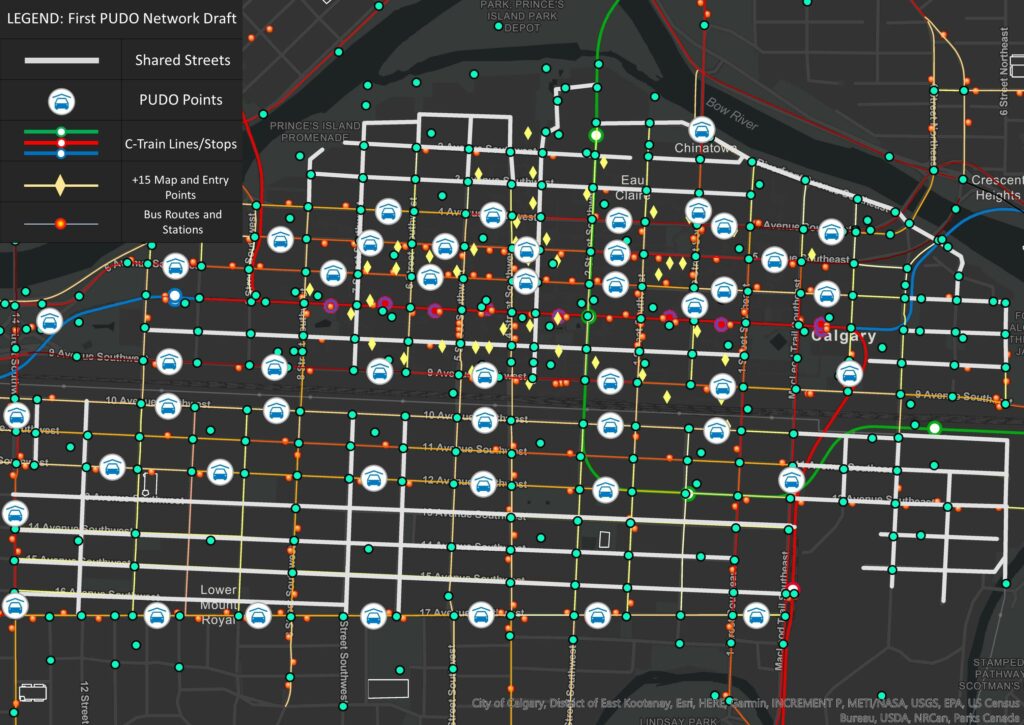
First PUDO location design based on our current traffic volumes base calibration. Public transit, +15 access, and centroid nodes for volumes used as initial decision factors for location placement. Shared streets lines are accessible almost anywhere along the street whereas multi-modal corridor PUDO points are specific points to which the vehicle can stop at – like a station.
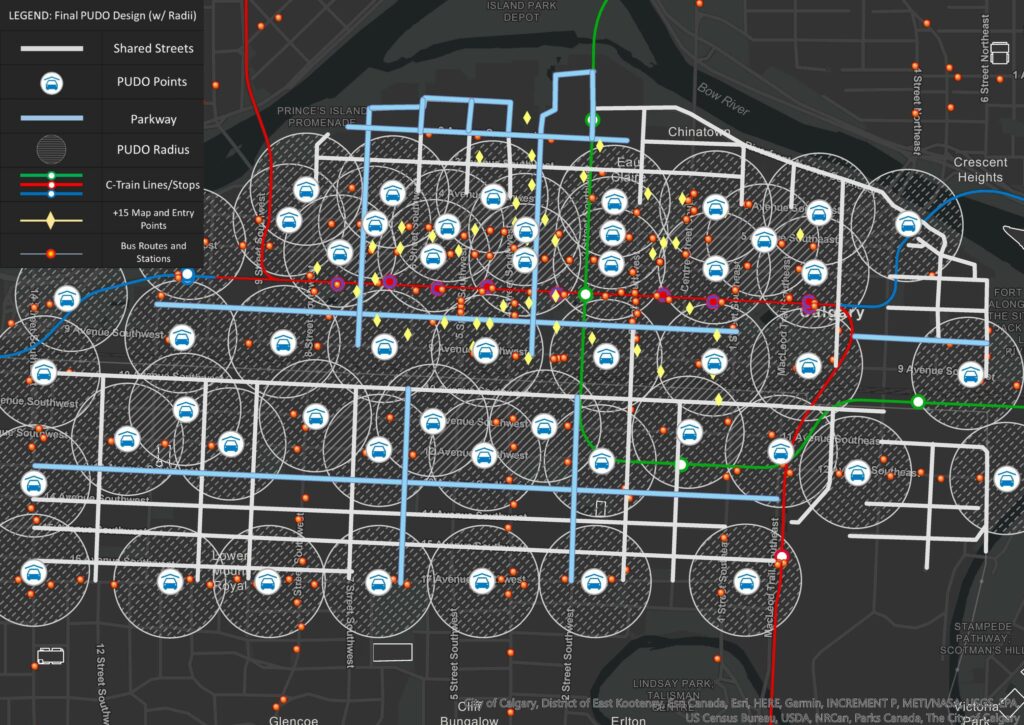
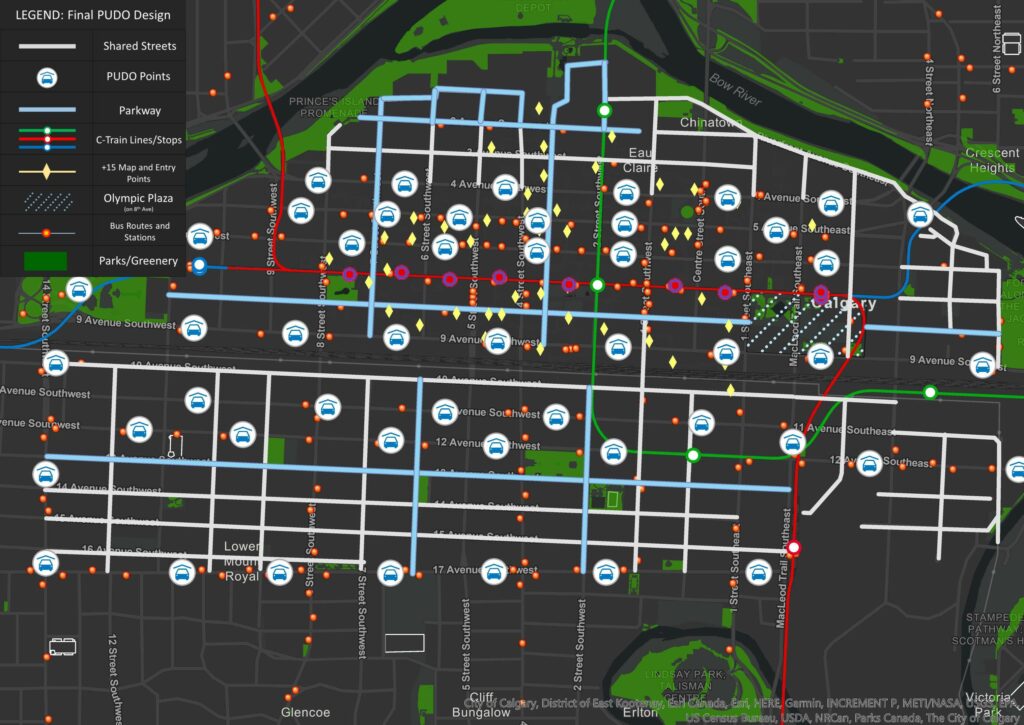
Final PUDO network design is shown after several iterations of back-and-forth testing between simulations and re-mapping. Using the same decision factors from previous layers as well as new AV volumes from MATSim simulation, multi-modal corridor PUDO points and shared streets are re-plotted, with the addition of parkways with only active-modes permissible. Final layout focuses on human-centric movement, accessibility, and active living.
DETAILS ABOUT OUR DESIGN
HOW OUR DESIGN ADDRESSES PRACTICAL ISSUES
Our design analyses possible futures of Calgary’s urban core as it integrates autonomous rideshare vehicles into its transportation network as a system of Autonomous Mobility on Demand (AMoD). Like many North American cities, Calgary’s downtown currently utilises street space primarily for personal vehicles, leaving little space for pedestrians and active modes of transport. As AVs are set to wholly change transportation use, there is an opportunity to utilise space to ensure that this transition can reduce congestion, improve travel for all street users, and improve the urban street network for a more livable and sustainable society.
Increasing space for human-centric (walking, biking etc.) modes provides walkability, green space and social vibrancy on streets that were previously ceded entirely to cars. Pick-up drop-off (PUDO) points placed in accessible locations allow for equitable and convenient access to an on-demand AV network. Using projected simulations, we designed a layout of shared streets and PUDO points which optimize the locations at which AV’s can service people while encouraging society to utilize the streets and live healthier lifestyles.
WHAT MAKES OUR DESIGN INNOVATIVE
Our design of novel streets, PUDO points and their locations anticipates both the streetside impact of AVs and their system level effect as a on-demand autonomous mobility network in Inner Calgary.
By designing not only the style of the PUDO points themselves, but also the network layout and locations, AV’s can be properly integrated to provide greater public benefit than a future where private actors independently implement AMoD with no system-level planning or considerations.
The utilization of open-source MATSim in the simulation of AMoD in Inner Calgary is a novel approach that can be built on by anyone as technology and conditions change and adapt.

By using a holistic and iterative approach our design provides possible system level scenarios that effectively reclaims street space for a more equitable, sustainable and healthier experience for all road users.
WHAT MAKES OUR DESIGN SOLUTION EFFECTIVE
- The utilization of transportation analysis software MATSim allowed for an accurate transportation modelling of autonomous vehicles using open-source code
- We utilized O/D trip matrix data obtained from projections forecasted by the Alberta Ministry of Transport.
- Location of PUDO points determined using different criteria tailored to complement existing downtown infrastructure such as +15, Calgary transit (bus and train), bike paths, parkways (Stephen Ave) etc.
- Several situations were modelled including the base simulation, a fully autonomous model with no transit, transit integrated with the AV model, and finally an optimized model. For each model, multiple iterations were performed which included street infrastructure and PUDO location changes to optimize each case.
- Link volumes were analyzed and system properties adjusted to optimize the system
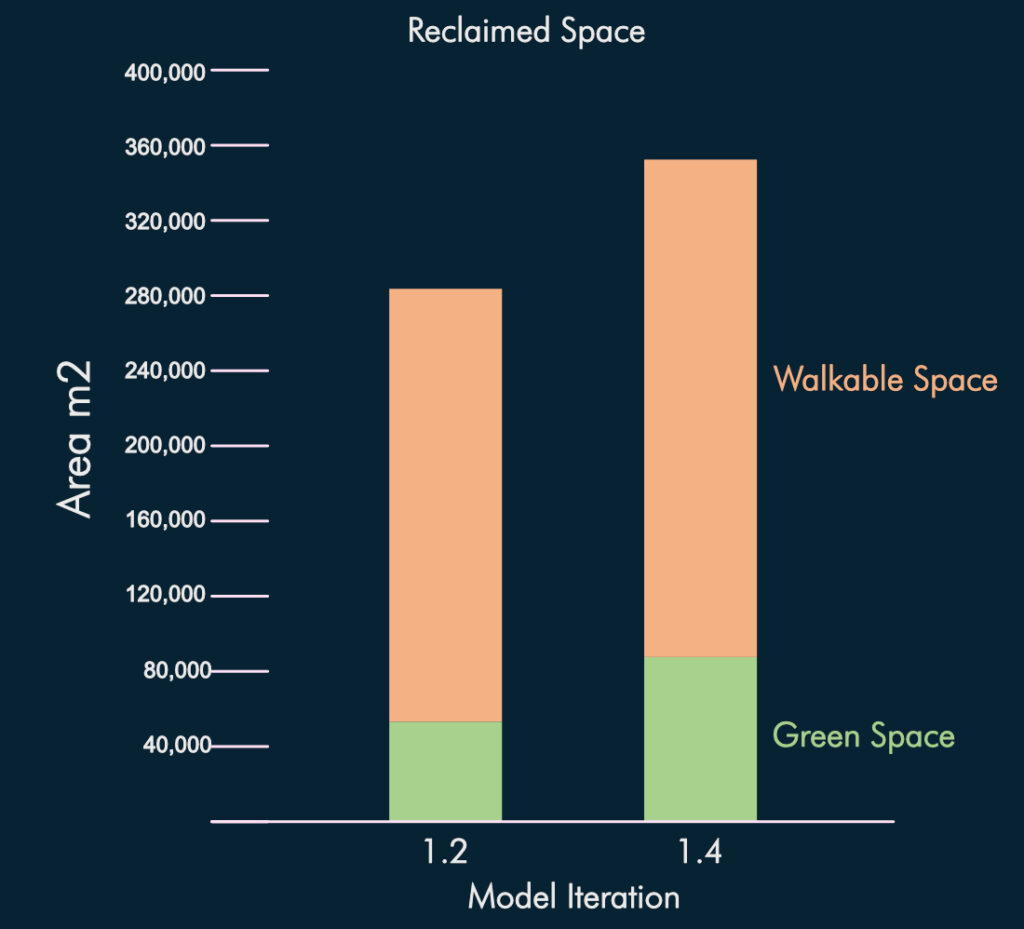
- Holistic focus on the three pillars (livability, sustainability and equity) during street space design resulting in reclaimed green space, increased walkability, and safe and accessible streets.
HOW WE VALIDATED OUR DESIGN SOLUTION
- Base simulation calibrated with data from CALTRACS (City of Calgary), providing an accurate model to compare the metrics of the other simulations.
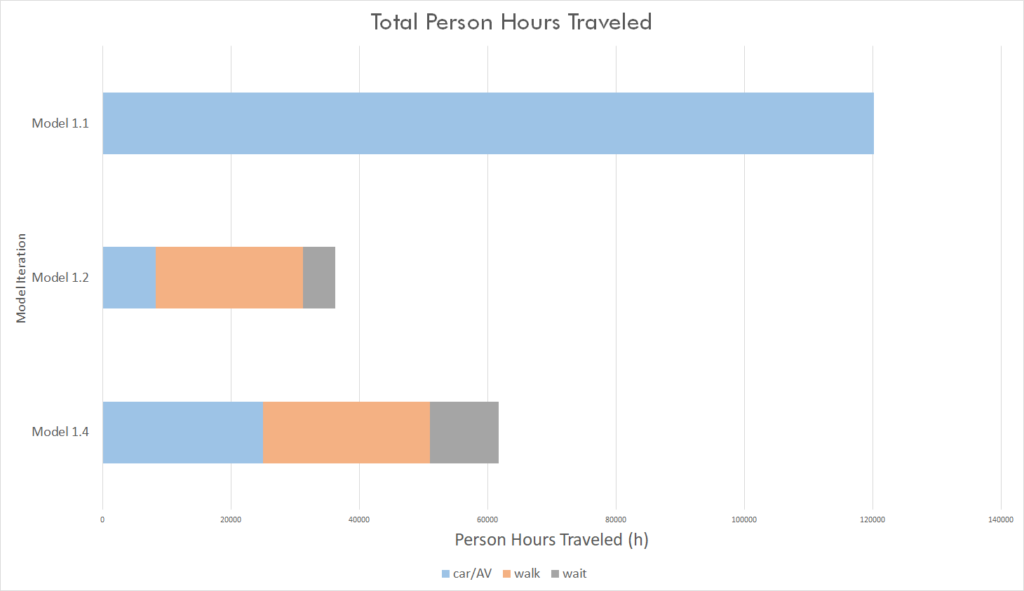
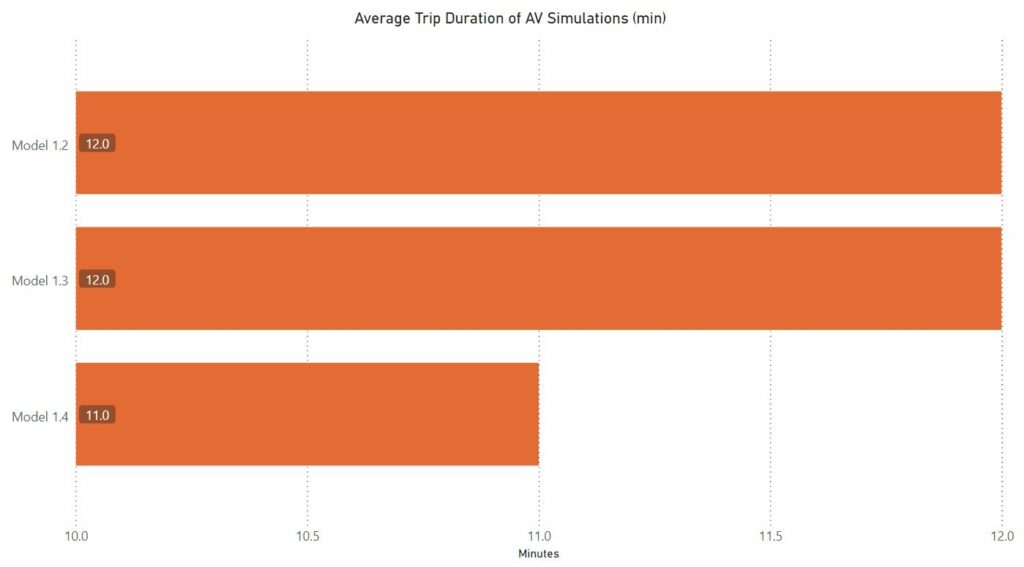
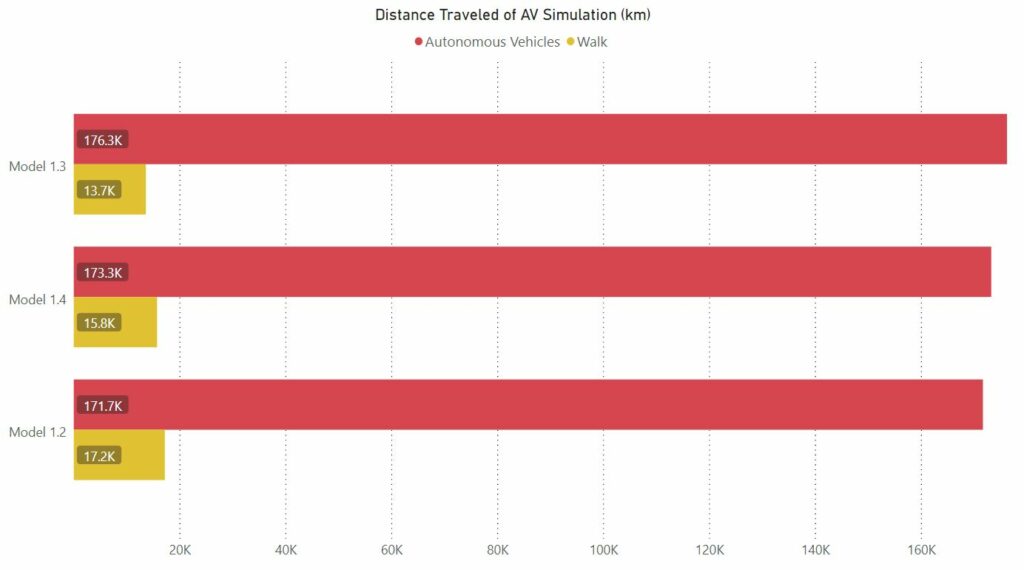
- Analysis included the consideration of system travel time, vehicle km traveled, and average trip duration which are the common metrics for evaluating transportation systems.
- Criteria for shared street and parkway implementation is influenced by City of Calgary Complete streets guide, and other urban planning guides and documents.
- Lanes reclaimed for PUDO
- <80veh/hr into shared streets
- <10km/h on shared streets
- Knowledge based feedback (from Ryan and Lina) regarding curbside management.
- Whether to put the bike lane right beside the road or maybe add a buffer to protect sidewalk users.
- Which streets are appropriate as parkways, shared streets, multi modal/PUDO lanes.
FEASIBILITY OF OUR DESIGN SOLUTION
- Design solution will cover the transition of implementation of AV vehicles in downtown Calgary as well as the complete phasing out of self driven cars in the system.
- Existence of pedestrian only spaces (Stephen Ave) led us to believe that parkways can be implemented on roads with such low traffic volume.
- Other lower volume roads, with great emphasis on safety, can be converted to shared streets, multi-modal corridors/PUDO lanes depending on the context of the space.
- The City of Calgary has adopted a Complete Streets approach to street design to encourage people to travel using active modes, resulting in more livable neighborhoods. This includes focusing on accommodating other means of transportation (walking, lime scooters, bikes, Segway’s, transit, etc.) rather than focusing on single occupied vehicles. This approach means more people would be inclined to use these other transportation modes while less people would be driving their personal owned cars, providing more incentive to Shared Autonomous Vehicles (SAV).
ADVISORS AND MENTORS
We would like to thank Dr. Lina Kattan and Ryan Martinson of Toole Design for their continued support, insight, and feedback throughout the duration of the project.
We would also wish to thank Dr. Ali Farhan and Mahsa Ghaffari from the Alberta Department of Transportation for supplying us with invaluable data forecasting future and current traffic volumes, without which our simulation would not be an accurate representation of Inner Calgary.
And finally, thank you Nouran Habib, who guided and advised us on the technical aspects of MATSIM, allowing us to learn and utilize the software effectively.
Your expertise has been very much appreciated in our design and helped us go above and beyond in our research. Thank you!
OUR PHOTO GALLERY: CASE STUDIES
Column 1: Multi-Modal Case Study @ 6 Ave
Column 2: Shared Street Case Study @ 10 Ave
Column 3: Parkway Case Study @ 8 Ave