Project Category: Electrical
About Our Project
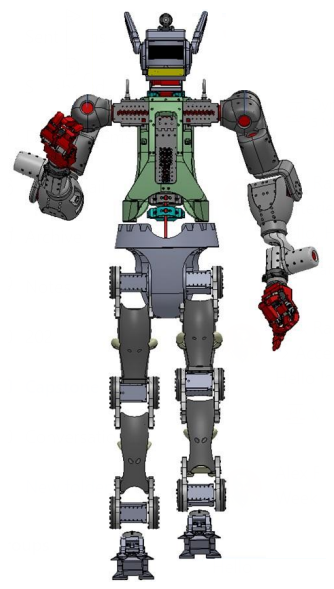
Since 2014, the Robotarium robotics research lab[1] at the University of Calgary has been developing a life-size humanoid robot to interact with the environment, move inside confined spaces, perform tasks in complex outdoor terrains, and interact with other robots. The robot will also be used to perform several complex motion and locomotion tasks such as crawling, walking on rough surfaces, and acrobatic maneuvers which will require moving all motors/joints as needed.
Previously, in collaboration with Robotis Inc. a humanoid robot with 29 DOF was developed. However, this robot had certain limitations, such as limited sensor functionality, an unsuitable power distribution system and limited dexterity due to the use of only one motor per hand.
In order to mitigate these limitations, our team has developed a solution which implements hardware and software tools to communicate and control the new version of the robot with 39 DOF. Our design accommodates the use of new sensors to improve functionality, implements power regulation which allows us to power all electronics and motors from a single battery, and implements a software solution using ROS that allows the user to gather and store data from the sensors, and motors, and allows for control of the motors through a GUI.
Meet Our Team Members






Ismail is a 4th-year student at the University of Calgary majoring in Electrical Engineering with a Computer Engineering Minor. His interests include Analog & Mixed signal circuit design and he will be attending graduate school at the University of Calgary after completing his undergraduate degree.
Marwa is a 4th-year student at the University of Calgary majoring in Electrical Engineering with a Computer Engineering Minor. Her interests include Analog and mixed-signal circuit design and she plans on attending graduate school after completing her undergraduate degree.
Anthony is a 4th-year student at the University of Calgary majoring in Electrical Engineering. His interests include power systems, specifically power transmission and generation. After graduating he hopes to begin his career as an EIT.
Ibietela is a 4th-year student at the University of Calgary majoring in Electrical Engineering with a Computer Engineering minor. His interests include machine learning, and the application of IoT devices. After graduating he hopes to begin his career as an EIT.
Wajeeha is a 4th-year student at the University of Calgary majoring in Electrical Engineering with a Computer Engineering Minor. Her interests include power systems, specifically power systems planning and modelling. After graduating, she hopes to begin her career as an EIT.
Safwan is a 4th-year student at the University of Calgary majoring in Electrical Engineering with a Computer Engineering Minor. His interests include wireless communication systems, specifically the applications of IoT systems. He hopes to attend graduate school after completing his undergraduate degree.
Details about our design
HOW OUR DESIGN ADDRESSES PRACTICAL ISSUES
The use of Autonomous Robotic Systems (AuRoS) is required in robot assisted Urban Search and Rescue (USAR) missions in which they are required to navigate and search disaster environments for victims, identify areas of concern, perform repair activities, as well as many other tasks[2]. Since these environments are often unknown, it can become challenging for these robots to carry out their desired function[2].
Our design will enable AuRoS to navigate in a dynamic environment by developing a power distribution system to allow for reliable operation of motors and sensors, as well as real-time collection of raw sensor data (e.g. position, orientation, joint position and velocities, and LiDAR depth maps)[2]. Tools that allow for control over the robot’s limbs using a robot operating system (ROS) are also included within our design.
WHAT MAKES OUR DESIGN INNOVATIVE
Hardware:
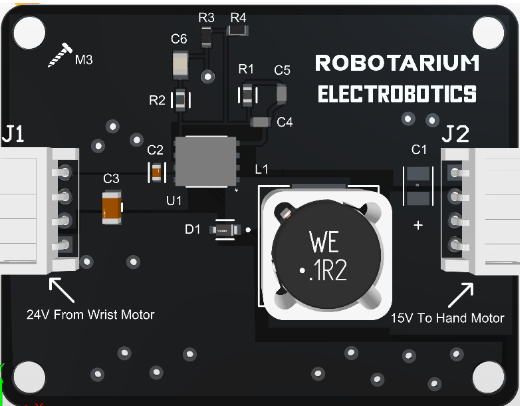
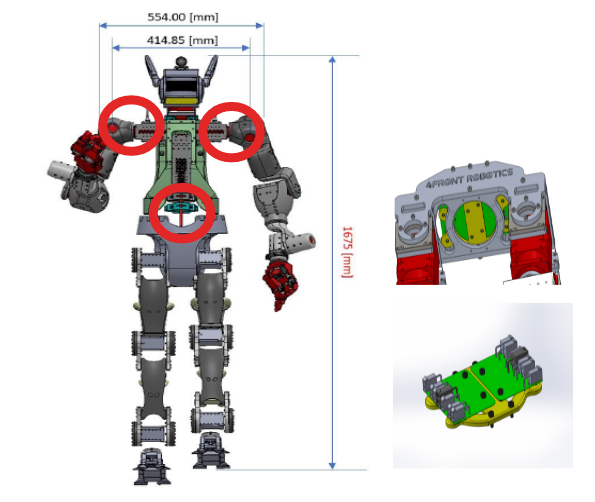
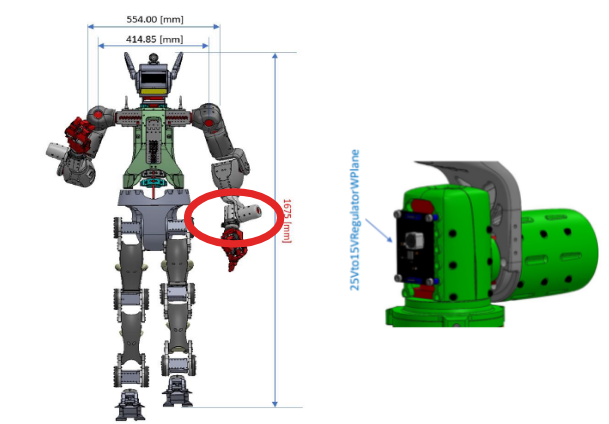
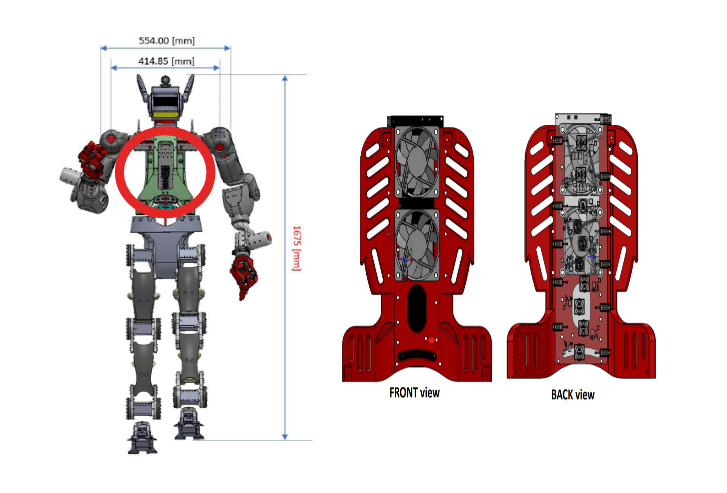
To accommodate the power consumption of 39 motors, as well as 4 additional sensors, custom PCBs were designed to distribute and step down voltages to obtain a single power source for all components As well, our design accommodates extra power outputs in case of additional connections. The aspect that really sets our project apart is achieving our goals against the restrictions and requirements presented by a robot. These factors include things like limited space, minimizing power consumption, and ensuring joint range of motion is not restricted by circuit design

Software:
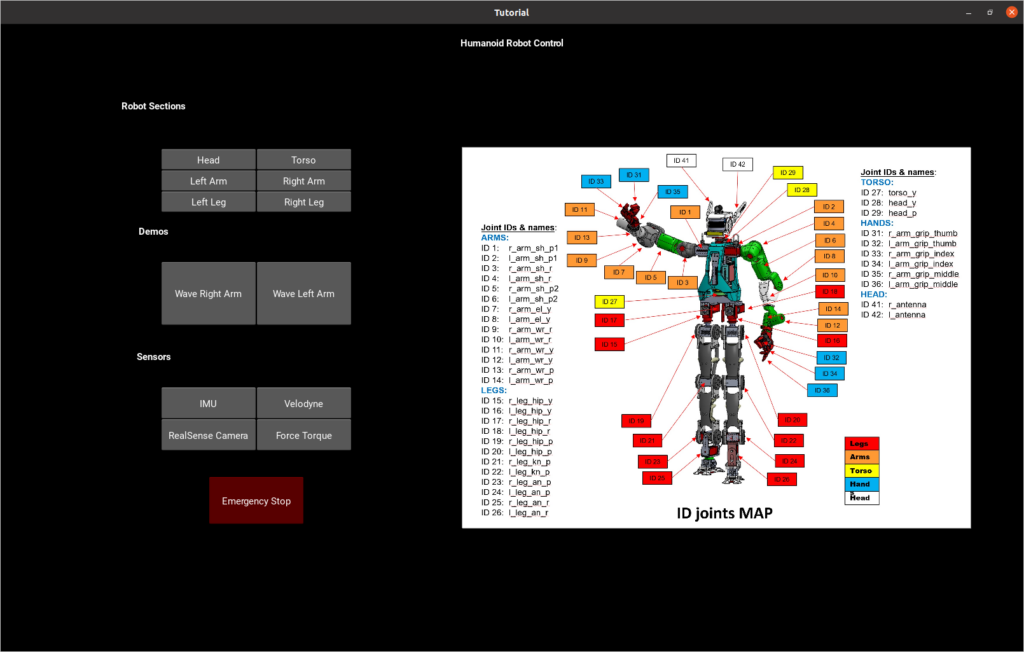
Our design integrates ROS with Python to create a user-friendly GUI which allows users to control movement of the robot, and view sensor data. Sensors used by the robot were also configured and methods to collect real-time data were developed, and utilized.
WHAT MAKES OUR DESIGN SOLUTION EFFECTIVE
Our design solution is succesfully able to communicate with every motor in the robot, and also provides an easy to use interface for users to control the robot. As well, reliable sensor data is collected and outputted to a log file for future processing. Power is provided to the robot reliably through the use of our PCBs, and implements safety features such as a switch which disconnects power to the motors in the case of an emergency.
HOW WE VALIDATED OUR DESIGN SOLUTION
Hardware Validation:
When designing our circuits we always ensured we received the expected voltage and current readings at every stage. Whether we were confirming proper soldered connection on our PCBs or working on larger power distribution lines. Constant testing allows us to keep the sensitive electronic devices we are powering safe from improper operation. By running rigorous testing at every stage we were able to numerically determine the correct operation of all our designed electrical systems. With these verification results we can determine we were able to successfully achieve our hardware project goals of powering all the robots’ systems, Implementing a single power on/off button, and reducing the overall cost of the electric systems.
Software Validation:
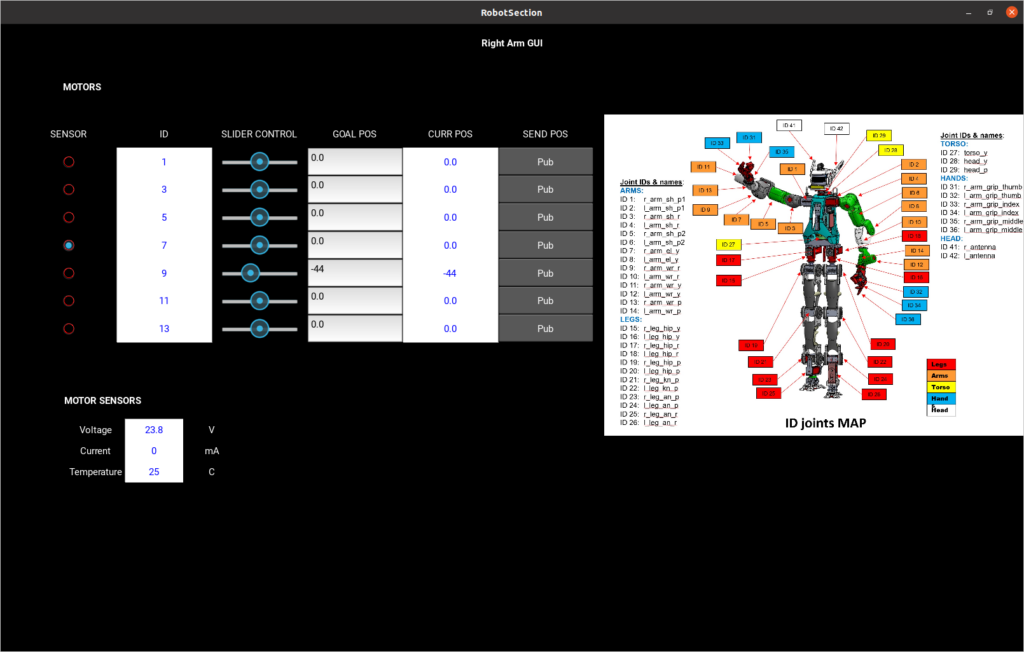
Each iteration of the Graphical User Interface (GUI) involved testing the motors on the robot. When testing the motors, the main goal was to change the position of the motors, record data from the motor sensors, and output it to the terminal. It was critical to ensure that the movements of the motors corresponded to the input of the user when testing the validity of the GUI. Furthermore, rigorous testing of the sensor data was done to ensure the correct sensor information was being collected and outputted to the terminal. And lastly, when testing the capability of the GUI to create log file outputs, the contents of the log files were inspected to verify they contained the correct sensor data.
FEASIBILITY OF OUR DESIGN SOLUTION
Several factors allowed our design solution to be feasible:
- Having a user-friendly Graphical User Interface for users to control the movements of the robot.
- All members of the hardware team had significant prior experience with PCB design.
- Having a single modular PCB to power the several different components of the robot.
- Testing of hardware components and software applications ahead of time to allow design improvements.
- Frequent meetings with stakeholders to provide updates on project progress and ensure results match design expectations.
- Frequent feedback from our project sponsor Dr. Alex Ramirez-Serrano and our academic advisor Dr. David Westwick.
Partners and Mentors
We want to thank our industry sponsor Dr. Alex Ramirez-Serrano for his insight into electrical and mechanical engineering and its management aspects. His experience was an excellent base for the project development process, and an inspiration for future projects. The team would like to make an additional acknowledgment to our academic advisor Dr. David Westwick. His technical knowledge was a great help during more demanding aspects of the project.
Our Photo Gallery
References
- “Unmanned Vehicles: Canada,” UVS Robotics Lab. [Online]. Available: https://www.uvs-robotarium-lab.ca/. [Accessed: 19-Nov-2021].
- “Humanoid robot,” UVS Robotics Lab. [Online]. Available: https://www.uvs-robotarium-lab.ca/humanoid-robot. [Accessed: 01-Apr-2022].
