Project Category: Electrical
Join our presentation
Our presentation will be held in-person during the 2022 SSE Engineering Design Fair on Tuesday, April 5, 2022, from 9:30am to 2:30pm.
About our project
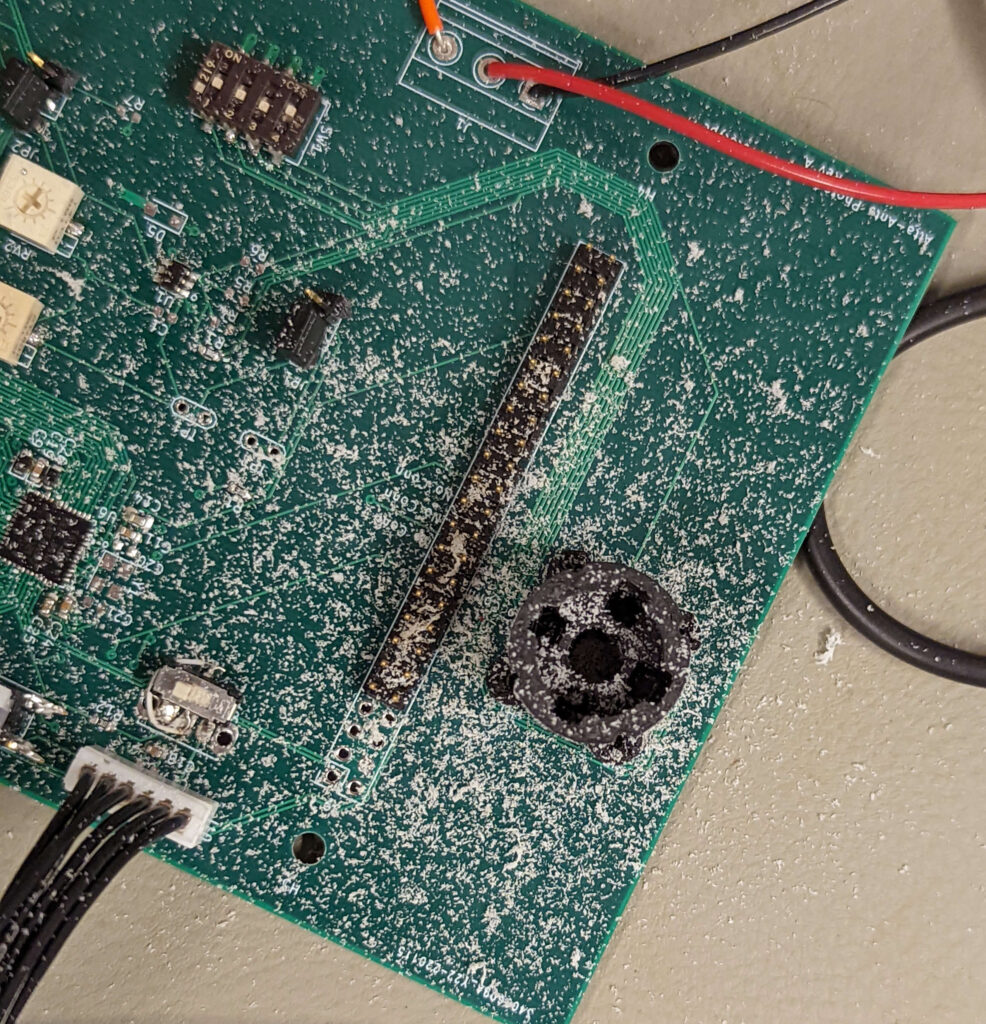
Attabotics Inc., a manufacturer of warehouse inventory management robotic systems, sponsored the redesign of a proximity sensor on their robots. The sensor determines whether inventory-containing plastic bins have been loaded onto each inventory management robot successfully. For years, a dust-susceptible optical time-of-flight sensor has been deployed; the sensor measures the time it takes light to travel to and reflect off the bin.
The team explored and evaluated multiple solutions, including:
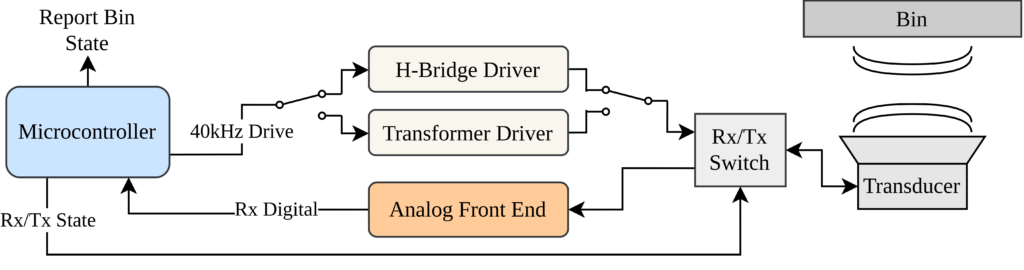
- one design which uses ultrasonic sound waves, and
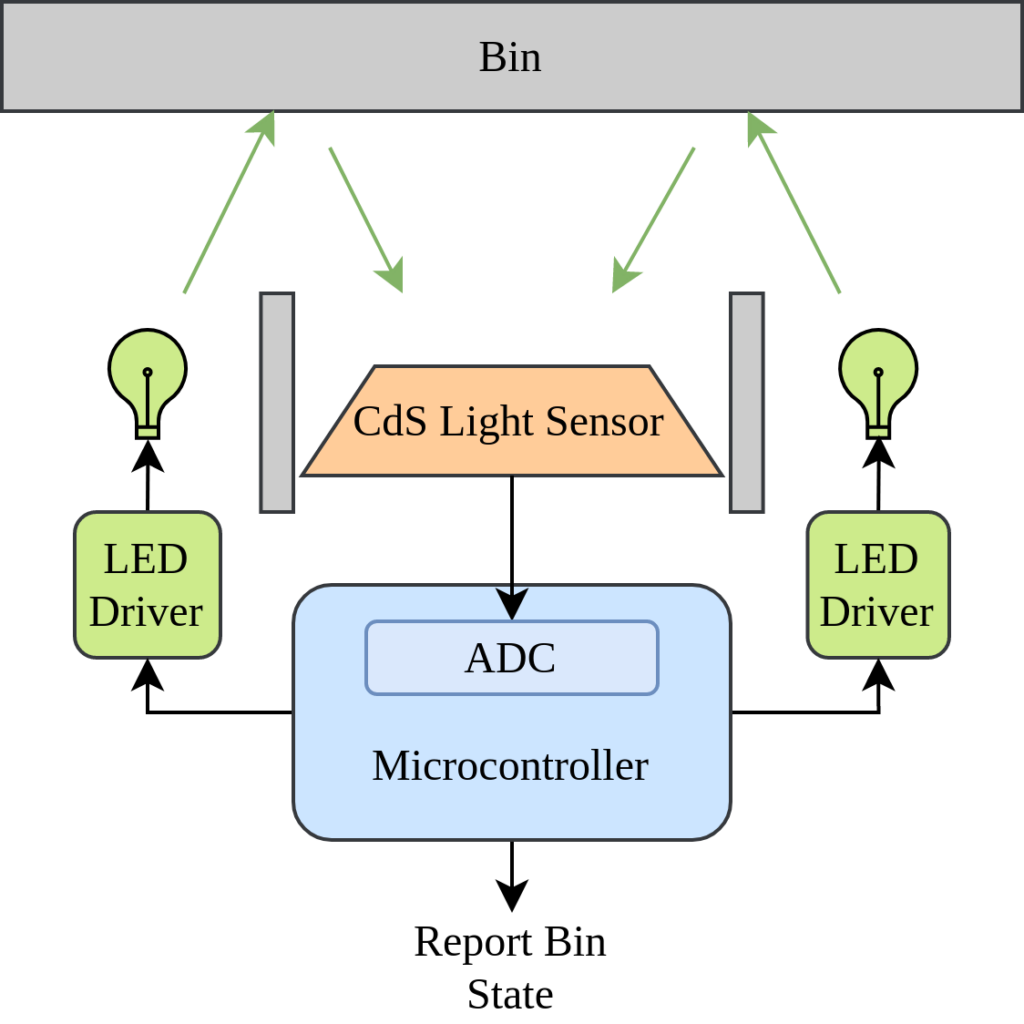
- one that uses ultra-bright LEDs and a photodetector (light sensor)
Select solutions were prototyped and evaluated based on their applicability, effectiveness, robustness, and susceptibility to environmental conditions. Recommendations made to Attabotics include:
- integration of our prototyped drop-in replacement photodetector-based sensor into their robots, and
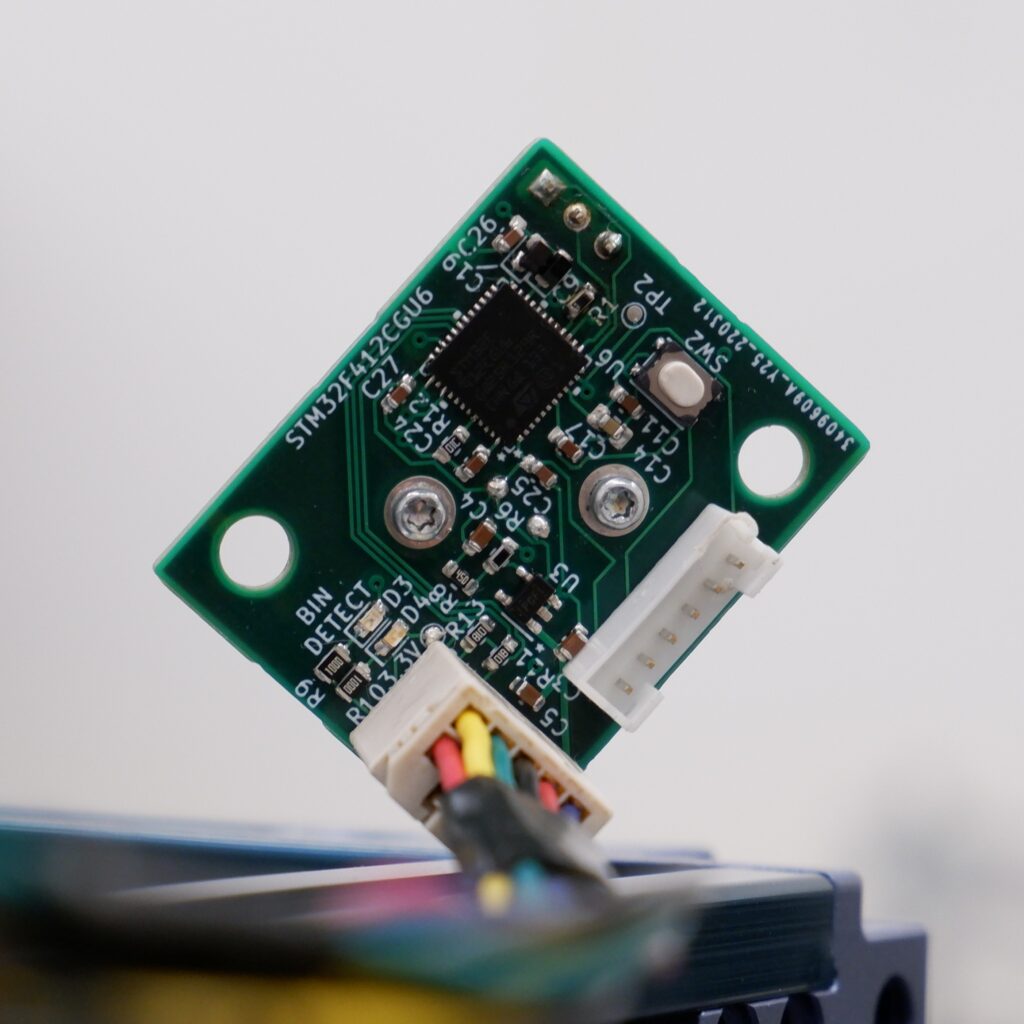
- potential BOM simplification by utilizing microcontroller systems already present in the robots to decrease component counts while continuing to minimize design creep.
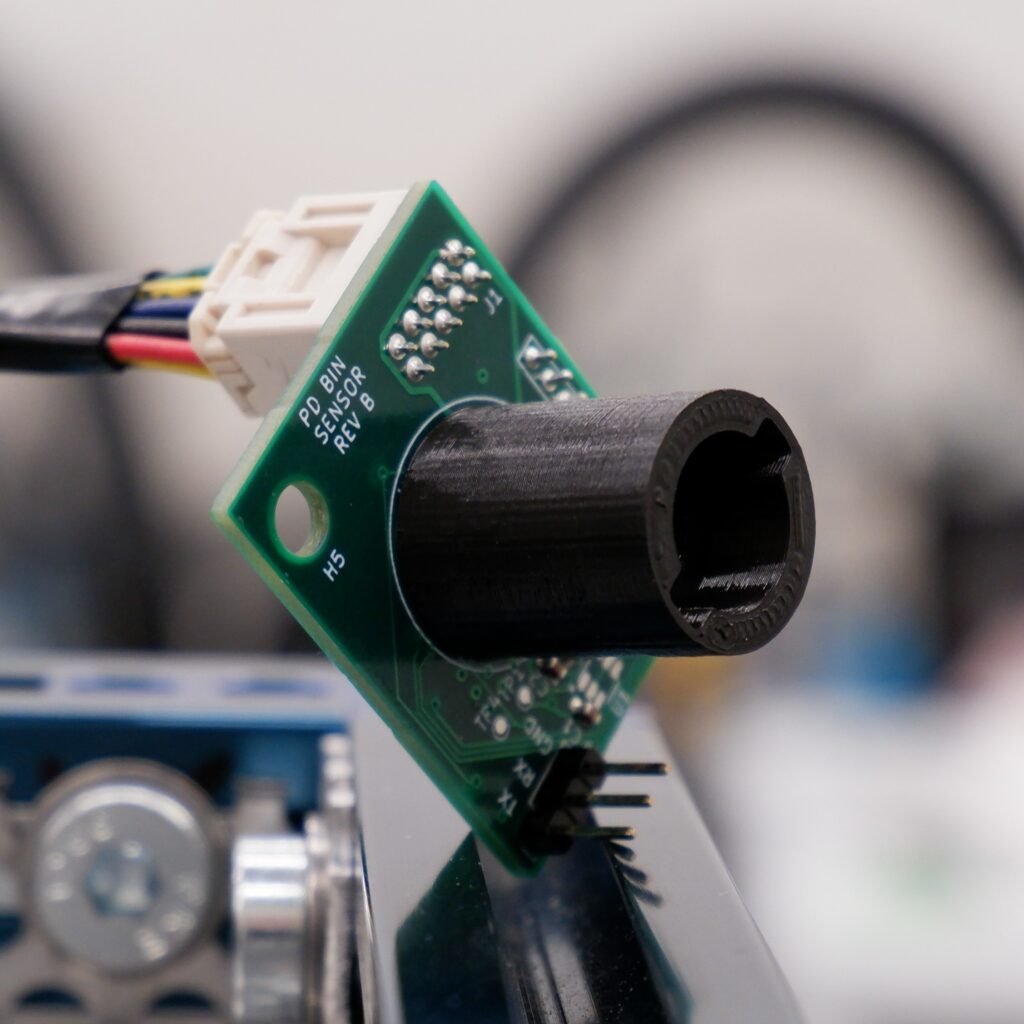
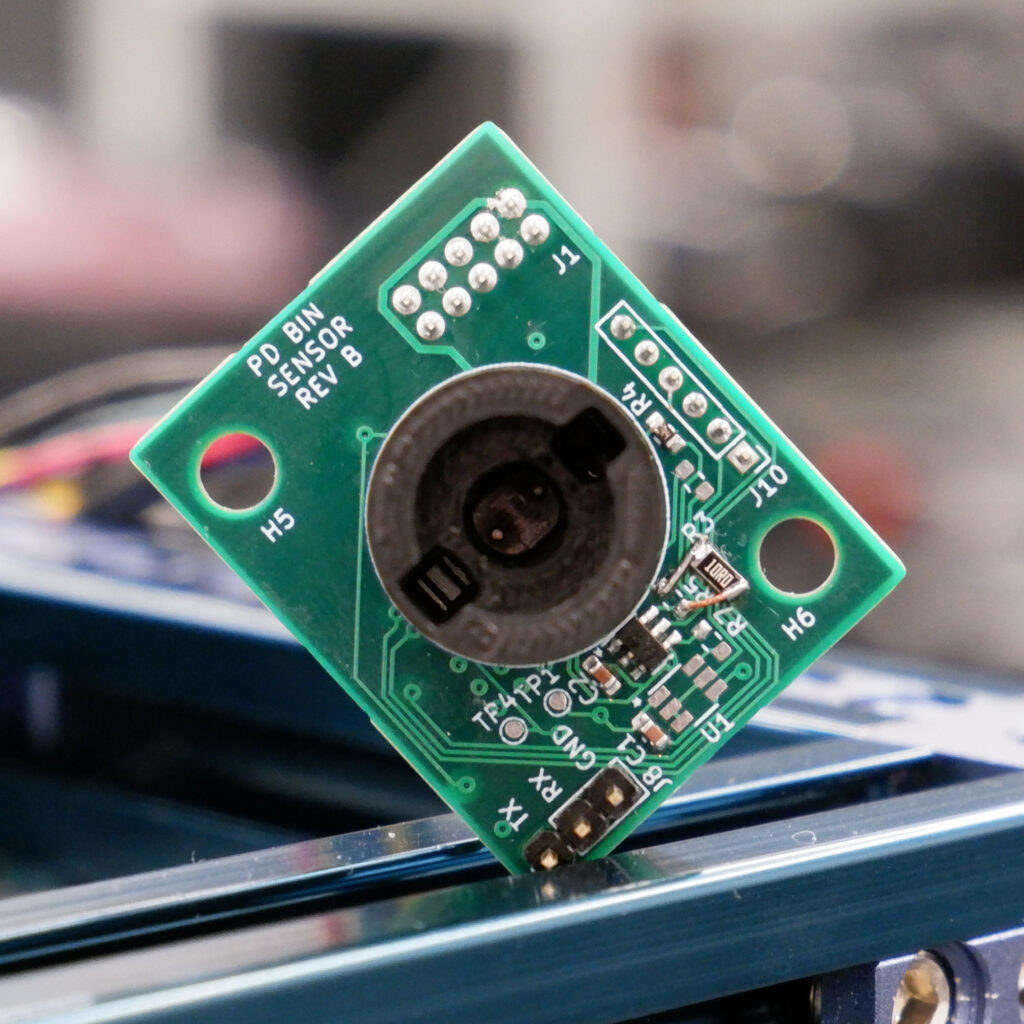
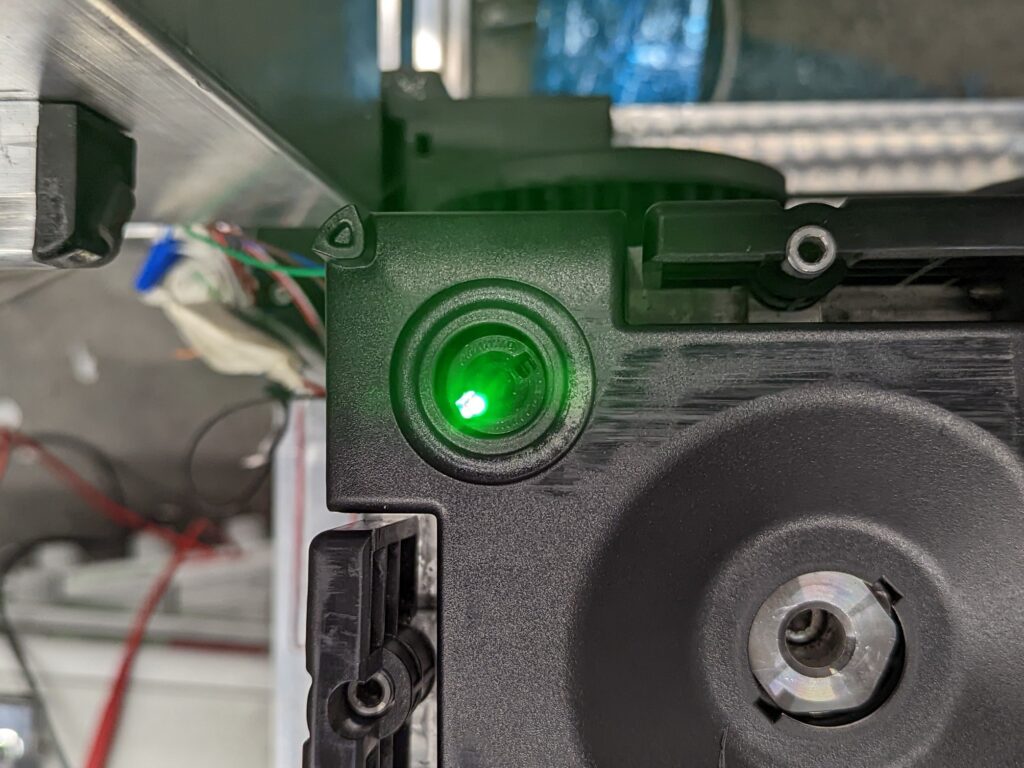
The prototype photodetector sensor, which uses the reflection of flashing ultra-bright LEDs off the bin’s surface to reliably detect the bin’s presence in a variety of environmental, dusty, and ambient lighting conditions, is a cheap, simple, modular, and effective solution.
Meet our team members

Parker Link
Michaela Gartner
Demiana Ekladious
William Ledingham
Details about our design
The team designed two complete printed circuit boards (PCBs): an ultrasonic sensor, and a photodetector.
For each of the two PCBs, the following design steps were completed:
- An electrical schematic was created, listing all components and their interconnections.
- The schematic informed the creation of a circuit board layout.
- A design review was completed in consultation with Attabotics.
- The circuit board layout was sent to a fabrication company, and was turned into a physical circuit board.
- The PCB was populated by soldering components.
- Each PCB was testing in accordance with our initial board bring up plan. Debugging ensued.
- Each PCB was tested with our Initial Test Plan. Debugging ensued, as various design decisions were considered and documented.
- Changes were made, and a second-revision board was ordered of the photodetector design. The design process was repeated.
HOW OUR DESIGN ADDRESSES PRACTICAL ISSUES
Attabotics Inc., a successful robotics company based out of Calgary with customers worldwide, has strived to increase the reliability of their robots with each new revision of their infrastructure. While their current bin sensor is generally reliable and is far from the least reliable part of their early-revision robots, the increased maintenance cost and the cost of even a single failing bin sensor in a system with 10s-to-100s of bin sensors, is quickly becoming a limitation of the Attabotics inventory management system.
By increasing the reliability of the bin sensor, specifically optimizing for lower maintenance and fewer failures as a result of dust accumulation in the deployment environment, our team is helping increase the effectiveness and robustness of the entire inventory management robotics system.
Increasing the reliability and decreasing maintenance costs allows each Attabotics system in deployment to operate for longer, allows the systems to operate with a higher bin throughput, and ultimately allows them to gain and retain more customers.
WHAT MAKES OUR DESIGN INNOVATIVE
My nature of the task at hand, there were a wide variety of potential design solutions. By considering, comparing, prototyping, and evaluating a multitude of potential solutions to varying degrees, the team was able to determine the most effective solution, on a basis of:
- Design complexity
- Unit cost
- Design creep
- Power consumption and electrical considerations
- Robustness and reliability
- Integration complexity
The innovation of this project is not characterized by the complexity of the final project, but rather by its validation performance, the nature of its ease-of-integration (our final product is a drop-in replacement electrically), and its elegance.
WHAT MAKES OUR DESIGN SOLUTION EFFECTIVE
By comparing and evaluating multiple design alternatives, including an ultrasonic sensor and a photodetector sensor, the team was able to choose the single most effective solution within the constraints of the problem.
The photodetector solution is effective because:
- It detects whether bins are present.
- It meets and exceeds the technical specifications of the design roadmap.
- It features a simple-to-understand design, allowing for full design auditability and easy debugging.
- It features numerous customization options (e.g., sensitivity thresholds, LED intensity, etc.), which have been fine-tuned to fit the constraints of the problem while minimizing power consumption.
- It has extremely high reliability, experiences failures less frequently than the previous system, and requires less maintenance.
- It is extremely modular.
- The design minimized design creep into other systems within the robot, allowing for easy integration.
- Each board is cheap to make.
- It is configurable, with parameters easily tunable and well-documented for the future should design needs change.
- The board is nearly a drop-in replacement to the existing system, decreasing design costs.
- It outperformed alternative design options.
HOW WE VALIDATED OUR DESIGN SOLUTION
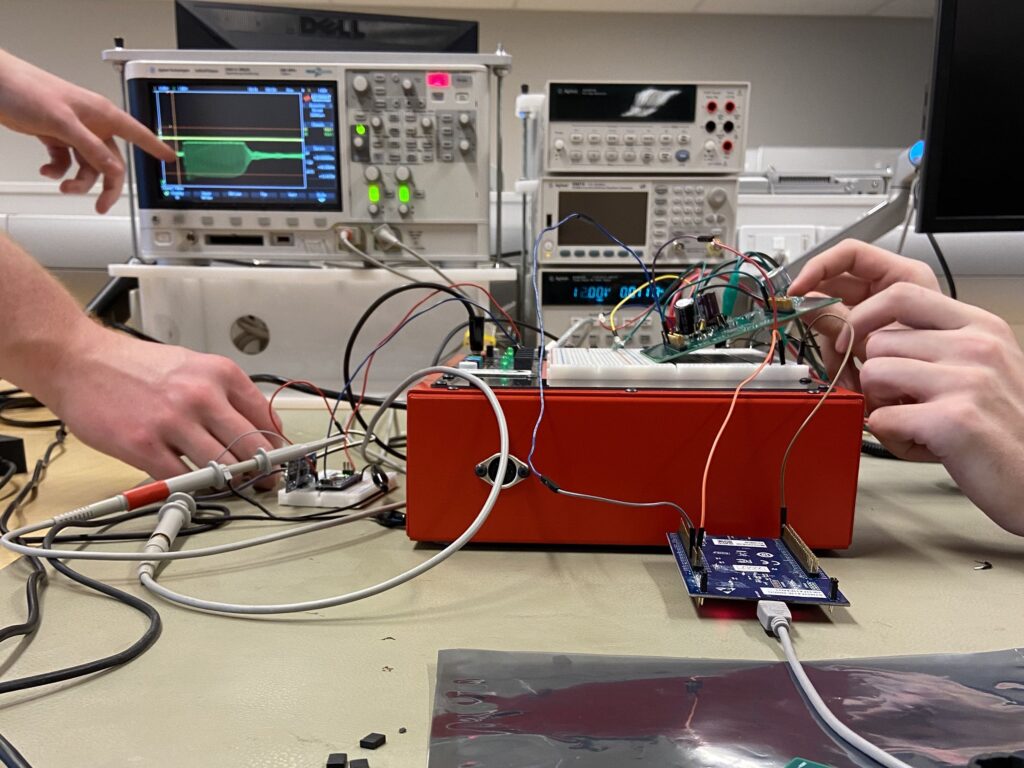
Extensive testing and design validation was completed on each prototyped solution in order to determine the feasibility of each potential system. Each system was evaluated during bench testing, where the device under test (DUT) was put through a series of qualitative functionality tests and quantitative performance tests. A comprehensive initial test plan was followed for each board (photodetector and ultrasonic), and the customizable capabilities of each board were testing individually and then on a system level.
At this point, it was deemed that our ultrasonic board lacked qualities that the photodetector board held, and so ultrasonic design development ceased.
After the photodetector board was selected as the design to be brought to maturity, a final revision was designed which incorporated the optimization tests performed on the first board. Specifically, turned parameters included:
- The CdS cell model
- The CdS cell resistor (characterization with MatLab and scope captures)
- Selection of LED model and LED current
With a final pre-validation design complete, and with bench tests completed, the board was installed in a proprietary test fixture at Attabotics where it could undergo full-system testing, and ensure that it functioned properly in scenarios including:
- Full system (i.e., full robot) power-up
- Full system integration testing
- Grab and place bin cycles
- Long-term repeated grab and place bin cycles
- In-situ grab and place bin cycles
FEASIBILITY OF OUR DESIGN SOLUTION
Quite feasible.
Not only was a final revision of the team’s design solution brought to maturity with a final prototype, but the design was also validated extensively, nearly to the standards held by Attabotics. The design is ready for integration into the Attabotics robots.
The greatest limitations in feasibility involve the required mechanical redesign of certain nearby enclosures; such components are generally redesigned revision-to-revision within the robots, making the design able-to-be-integrated within one-to-two major robot versions.
Extensive validation and in-robot testing suggests that, so long as the minor mechanical redesigns can be completed, the design will integrate successfully with Attabotics robots. Discussions with Attabotics suggest that the benefits of this design (namely, its cost effectiveness, reliability, customizability, and simplicity) will make it an optimal fit within the robot.
Partners and mentors
Attabotics Inc., a Calgary-based robotics company specializing in warehouse inventory management robotics systems, sponsored the project. A huge thanks goes out to the numerous engineers who helped discuss considerations, review designs, provide feedback, and help with design validation and testing.
Dr. Norm Bartley, a professor in the Department of Electrical and Computer Engineering at the Schulich School of Engineering, served as the Academic Advisor for this project.
Our photo gallery
References
- “Calgary-based Attabotics is reinventing the supply chain,” Western Economic Diversification Canada, 07 Oct 2020. [Online]. Available: https://www.wd-deo.gc.ca/eng/20099.asp. [Accessed Oct 2021].
- S. Gravelle, R. Cowley and A. Woolf, “Storage and Retrieval System with Shaft-Traversing Tracks”. US Patent 11008165, May 2021.
- ”Supply Chain Automation and Robotics,” Nordstrom, [Online]. Available: https://press.nordstrom.com/gallery/39721/grid/. [Accessed 2021].
- Toa, M; Whitehead, A, “Ultrasonic Sensing Basics,” Texas Instruments, 2020. [Online]. Available: https://www.ti.com/lit/slaa907. [Accessed 2021].
- Multicomp, “MCUSD14A40S09RS Datasheet,” 2013. [Online]. Available: https://www.farnell.com/datasheets/1759995.pdf. [Accessed 2021].
- Pro-Wave, “Air Ultrasonic Ceramic Transducers 400ST/R160,” [Online]. Available: https://www.mouser.ca/datasheet/2/911/T400S16-1369697.pdf. [Accessed 2021].
- Triad Semiconductor, “TS8000 Ultrasonic to Digital Converter Preliminary Data Sheet,” 2017. [Online]. Available: https://www.triadsemi.com/wp-content/uploads/2019/09/Triad-Semi-TS8000-Ultrasonic-Receiver-Datasheet-Rev-C.pdf. [Accessed 2021].
- W. Du, “Resistive, Capacitive, Inductive, and Magnetic Sensor Technologies,” Boca Raton, FL: CRC Press, 2015.
- STMicroelectronics, “VL53L5CX,” 2021. [Online]. Available: https://www.st.com/resource/en/datasheet/vl53l5cx.pdf. [Accessed 2021].
- D. Wang, “FDC1004: Basics of Capacitive Sensing Applications,” Texas Instruments, 2021. [Online]. Available: https://www.ti.com/lit/an/snoa927a/snoa927a.pdf?ts=1636671649635. [Accessed 2021].
- ”Brand New Model F Keyboards – The Model M Predecessor: Mechanical Capacitive Buckling Spring Keyboards with NKRO,” Brand New Model F Keyboards, [Online]. Available: https://www.modelfkeyboards.com/. [Accessed 2021].
- D. Ekladious, M. Gartner, W. Ledingham and P. Link, “Design Roadmap: Design of a dust-resistant bin sensor for use in a robotic,” Calgary, 2021.
