Project Category: Electrical
Join our Presentation
Meeting ID: 915 2576 4025
About our Project
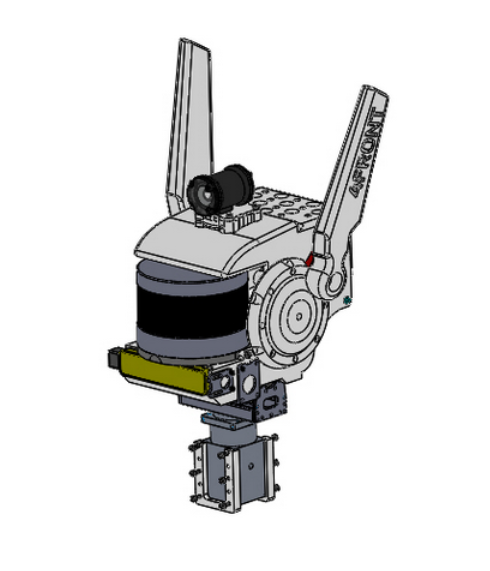
The Non-Verbal Humanoid Head is a part of a larger humanoid robot project which is designed to supply aid in confined or hazardous spaces, such as those encountered in search & rescue missions, cave exploration, or any place where it may be too risky for humans to work. Hazards such as presence of dangerous gasses or poor lighting can be identified and alerted by the humanoid. Our project primarily entails programming the logic for the Humanoid head to control its ears, level of lighting, and several attached sensors of the robot, as well as designs for any components or software systems that may be necessary to achieve this. Our final product is able to process decisions such as when to use a flashlight, when to alert if a gas leak is detected, and is also able to engage in basic non-verbal communication through its ears.
Meet our Team Members

Logan Wyborn – Team Manager
I am a fourth-year Electrical Engineering student at the University of Calgary. Early in my University career, I became interested in working to improve the power generation and infrastructure which support our cities. Throughout my studies, I have also discovered a particular interest in Embedded Systems and solutions, both in-class and in Extracurriculars. I believe that learning is a lifelong journey, and one I hope to continue both academically and experientially. I am excited by many opportunities in the world of Engineering today, and it is my hope that throughout my career, my work improves the lives of the people I serve.
Punit Patel – Software Lead
I am a fourth-year Software Engineering Student at the University of Calgary. I am a computer enthusiast and got interested in the applications of computers, early on in my university career. I learned the impact of robotics and IOT on our day to day life and developed a keen interest in Robotics and Embedded Systems. Through my classes, I learned fundamental software skills such as programming in C++, Python, and Java and worked on many embedded systems such as Arduino, DSPs, and several other microcontrollers. I am excited about the opportunities to create a positive impact on the lives of people, by solving real problems in the world and robotics industry.

Stephen Chen – Hardware Lead
I am a fourth-year Electrical Engineering student at University of Calgary. In the past few years, I have finished some projects about Embedded System including Arduino and Raspberry Pi where I found it was fun discovering solutions. I also grew my interest in Programmable Logic Controller and Control System which make a great effort in industrial production nowadays. I am looking forward to finding an opportunity to work in the automation control industry.

Tehseen Iqbal – Hardware Support
I am a fourth-year Electrical Engineering student at the University of Calgary. In the last few years I have found an interest in Embedded Systems design and programming. After graduating I hope to begin my career as an EIT and continue learning about new technologies and skills.
Details about our design
Addressing Practical Issues
On a top level, our design addresses the basic practical issues that a human may face in hazardous environments. Sight, smell and hearing are three senses that the human relies on to identify danger. With the help of the Humanoid, these senses are magnified to match the environment that the human is in.
Design Innovations
Our design was developed and tested iteratively, meaning we created multiple prototypes, which we tested with our simulated gas values, light values, and non-verbal emotions. After testing, improvements were made to the software designs. This also allowed us to perfect the design of our software after receiving feedback from our sponsor.
The programming of our flashlight is similar to that of a smartphone’s screen lighting; it adjusts automatically in response to the light around it. As the light detected increases, the light output from the flashlight decreases. This is done using recursive changes so as to prevent overcorrection and self-toggling.
Our current code is platform-dependent (ROS 1.0), however, it is a free platform which can be easily downloaded and will most likely be used by the next team who works on this project.
Effective Design Solutions
Our design solution is effective because it did not add any additional costs to the project and the nodes are easy to copy to use in other projects.
Validating Our Design Solution
Due to Covid-19, limited access to university labs led us to test our humanoid with simulated gas and lighting values. Not only did this make testing easier, it also allowed us to test against a wide range of gas and lighting values which would have been difficult to observe in a control lab environment.

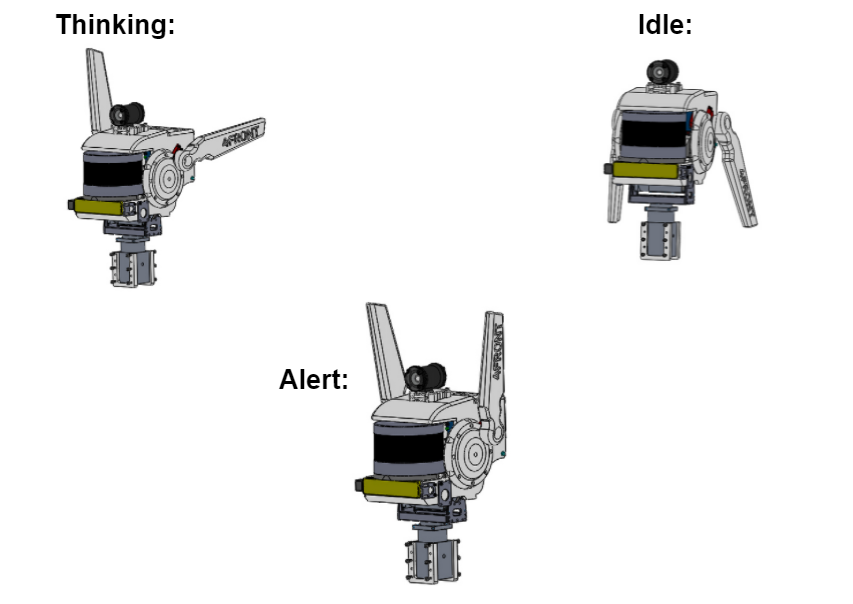
The Humanoid communicates non-verbally by moving its head and ears to demonstrate an emotion, similar to how an animal, such as a dog, would behave. The Ears are controlled by Servo Motors in order to display the ‘Intent’ of the Head program. This represents the state of the software as: Thinking, Idle, Alert, Danger. We created a survey that asked individuals to match an emotion with the Humanoid pictured with different head and ear positions. Based on the result of this survey, we were able to understand how humans identify a specific emotion and were able to implement it into our software.
Design Feasibility
The humanoid is designed to be built on and upgraded; as more requirements are identified, they can be added accordingly. Our software design and user documentation is set up to facilitate this need. Each functionality is packaged as a “node” which can be edited, duplicated, or taken out individually. All the nodes are then programmed to communicate with one another; this can be implemented across all nodes using similar coding which, in turn, minimizes complexity.
Partners and Mentors

We would like to thank the people who helped us with this project:
Industry Sponsor: Dr. Alex Ramirez-Serrano
ENEL 500 Teaching Assistant: Elham Sadeghabadi
Without their continuous feedback and direction throughout the course, this project would not be possible.
Our Photo Gallery

References
- https://www.uvs-robotarium-lab.ca/
