Project Category: Entrepreneurial
Join our presentation
About our project
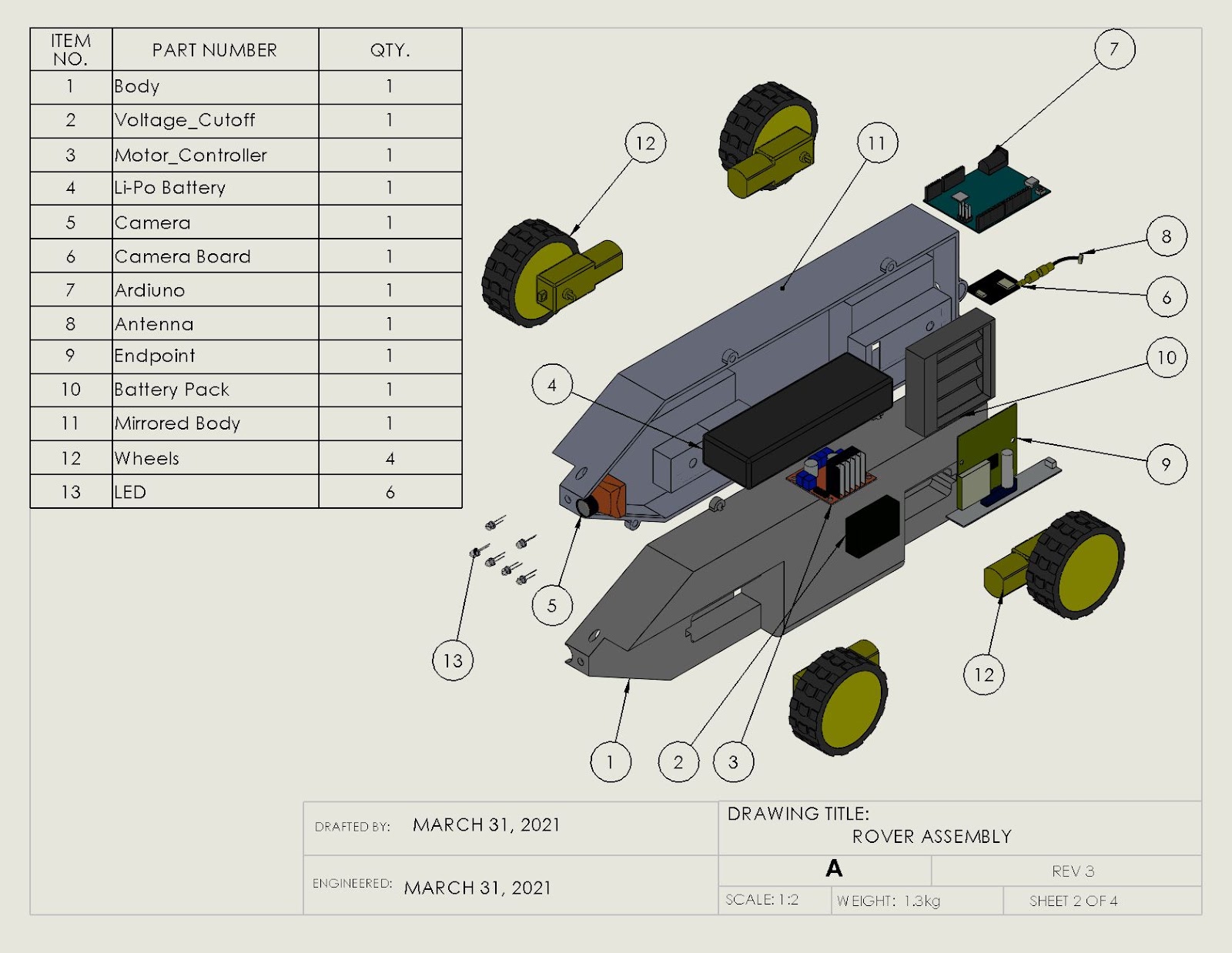
The Tat-sy rover is a revolutionary video pipeline inspection tool used to determine the condition of 6 inch or larger sewage and storm pipe. Our design replaces the heavy cables seen in today’s industry rovers with a seamless wireless video and control system. This allows us to dramatically reduce the weight while maintaining an aspect of durability.
The rover operates by having the video feed and movement split into two separate systems. The movement of the rover is controlled by a MLink system provided by AuroraWireless which allows for reliable underground communications. The video data is transferred via a simple transmitter and receiver. A thin but strong safety cable is attached to the end of the machine in case of situations where the rover stops performing as intended. To retain peak connection reliability, the systems sending the data to the rover will be placed at the base of the pipe down the manhole, which can be seen in the schematic below.

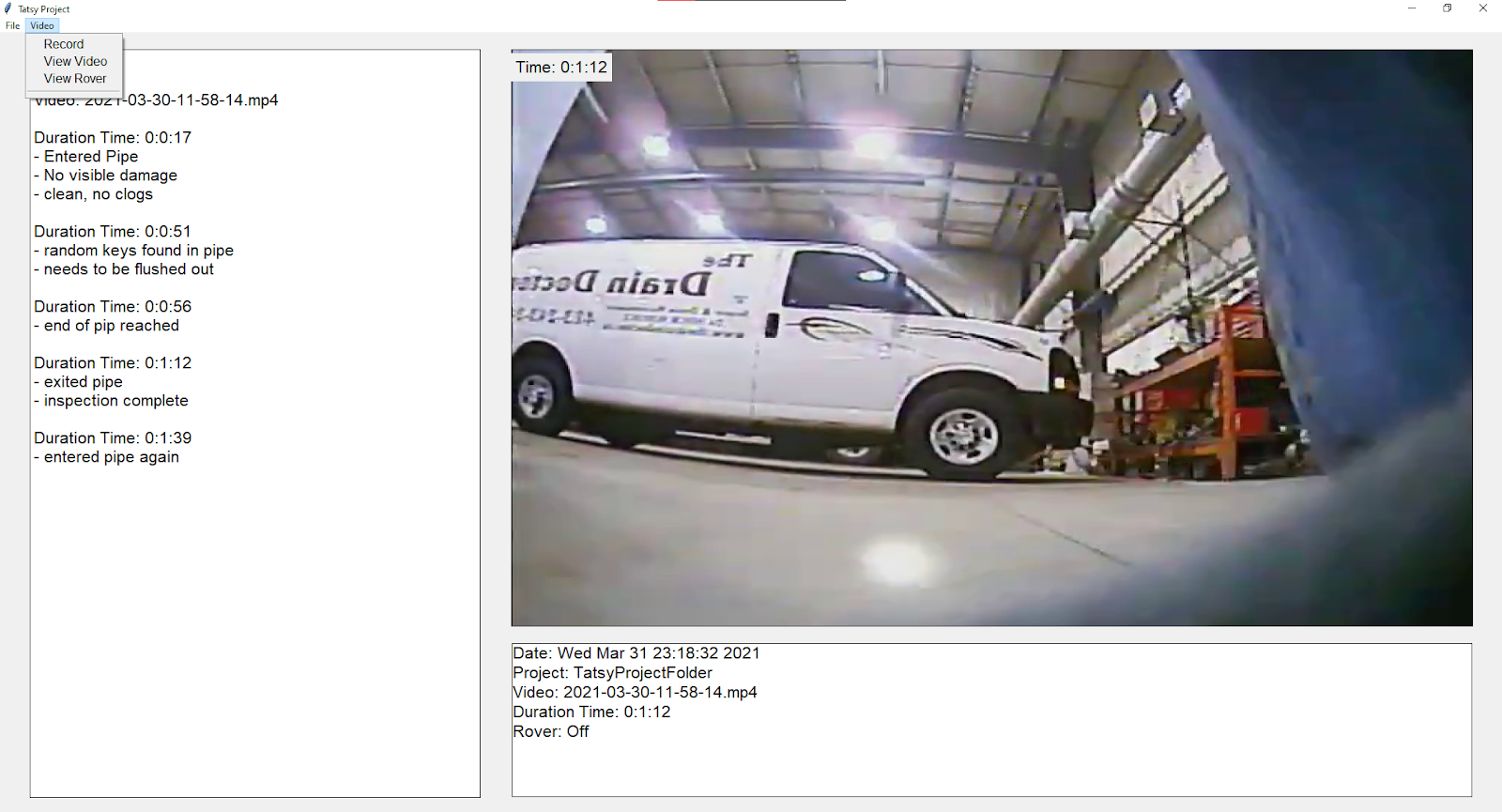
A simple control interface is designed to bring together the controls and video feed of the rover. This interface is built to be compatible with Windows 10 operating systems. This user interface allows for the recording and timestamping of the video feed, as well as a section for any additional notes that may be necessary during the inspection.
Meet our team members
Project Manager
4th year Mechanical Engineering Student
Justin Treherne has technical experience working in a team on various projects. These projects include the creation of an aluminium can launcher and crusher with the use of pneumatic control, the design and engineering of a receiver/action for a firearm chambered in .308 Winchester using SOLIDWORKS, the development of a small scale smart mirror, and multiple projects involving power improvement for mechanical and pneumatic systems. He also has basic typesetting/programming languages including basic CNC (Computer Numerical Control) G code, LaTeX, and Matlab. Lastly, Justin has completed his Dale Carnegie course which has served useful for gatherings and presentations and has some 3D printing experience.
Gesiye Kennedy has experience working on mechatronics projects bridging the gap between the electronic, software and mechanical aspects of projects. Some projects he has worked on is the creation of a Model Canadarm that uses a GUI made in processing to send data to and read sensor data to servos that control a 3D printed model. Relatedly he has recently completed work on a servo powered gripper controlled by a Muse 2 EEG band, a python program was made to receive and parse data from the EEG band through bluetooth and send it to the arduino controlling the servos over a USB connection. The gripper was designed in SOLIDWORKS and then 3D printed. Gesiye also has a previous year of experience from the Schulich UAV electrical team where he worked on using GPS data to control a radio antenna that tracked a drone to ensure that the signal was always at its peak.

Technical Lead
4th year Mechanical Engineering Student
Business Lead
4th year Mechanical Engineering Student
Kelvin Tran is currently pursuing a Bachelor’s Degree in Mechanical Engineering with a minor in Entrepreneurship and Enterprise Development. He has worked on many projects and extracurricular activities during his student career. Some projects that Kelvin has been involved in include the design and engineering of a rifle bolt, CAD modelling of a stirling engine, and planning for a modular child seat for children with disabilities. In the past year, Kelvin has also played an active role in programs such as Discover Engineering at the Schulich School of Engineering as an ambassador, and NeuroNexus as an innovator. Kelvin has technical skills of 3D modelling, programming in MATLAB and Python, and basic machining. Also, he has business skills of marketing and an understanding in entrepreneurship topics. In the future, Kelvin would like to explore further in the mechatronics and machine learning field.
Julian Pinto is a student working towards a degree in software engineering. He has worked on various projects as part of his courses but also outside of school out of personal interest. Some projects he has worked on include the creation of a web forum application designed to allow university students to better connect with their university’s community. His projects have taught him skills needed for a full stack developer. He is comfortable with various programming languages and is able to identify which language will be best depending on the project. Outside of course projects Julian has worked on projects to better his knowledge of mobile development as well as game development. In the future, Julian would like to complete more personal projects to further his knowledge of many different areas of software development.

Details about our design
HOW OUR DESIGN ADDRESSES PRACTICAL ISSUES
Through our personal experience and connections within the pipeline and drainage industry, we found that current industry rovers were heavy and at times unreliable. These issues tend to slow down the pipe inspection process costing companies both valuable time and money. Furthermore, these concerns were personally voiced within our interviews with current technicians and managers that have worked in the industry. Our design addresses the following issues:
- Reliability: There are intrinsic issues of reliability with a wired connection for the industrial rovers. These cables tend to fray and thus start to have connection issues over time as they continually rub against the interior pipe walls when reeling the rovers in. Also, since the weight of these machines are so heavy (upwards of 35 pounds), workers create a bad habit of using the cable to help control the rover when placing and removing them from the pipes, which weakens the cable’s connection point. Therefore, our wireless solution removes the issue of fraying important wires used for the video and control of the rover.
- Weight: The weight of these machines are usually quite heavy (upwards of 45 pounds), workers tend to have a bad habit of using the cable to help control the rover when placing and removing them from the pipes, which weakens the cable’s connection point. Removing the wired connection point and replacing it with a wireless solution not only makes our rover much more wieldy, but it also helps instill better working habits.
WHAT MAKES OUR DESIGN INNOVATIVE
The use of wireless connection is what differentiates us from our competitors. Currently, many companies use a hefty cable to send and receive data and controls. We use a wireless modem known as MLink developed by AuroraWireless to send reliable control data to the rover. Additionally, the video feed uses wireless transmission with the placement of the transmitter at the base of the pipe to allow for a clearer video connection. This allows us to create a product independent of problems associated with wired connections, along with dramatically reducing the overall weight of the system.
WHAT MAKES OUR DESIGN SOLUTION EFFECTIVE
Our design is effective because it tackles the main issue of reliability and convenience for our rover users. Our proposed rover design removes the heavy cabling that many industry rovers use for the data transfer and power. Without heavy wired cabling, our rover is free to maneuver down pipelines without the worry of cable detachment during inspections. The design process has also considered the ease of use of our rover. The innovative wireless design also reduces the overall weight of the rover for the convenience of the user. These changes of the removal of the power cabling and unnecessary weight allows for efficient and quicker pipeline inspections
HOW WE VALIDATED OUR DESIGN SOLUTION
We had a checklist of necessary features our final design needed to incorporate. Our main metric of success is integrating the fully wireless data transfer system. Other key points are our control station application connecting to the rover during inspections and the viewing of the video footage. We also performed several tests on our final prototype to check the validity of our design. These tests included a test run through a short pipe as well as some tests having the rover try to traverse the pipe at different inlines to check its traction in non-ideal conditions.
FEASIBILITY OF OUR DESIGN SOLUTION
We believe that from the support we have garnered from our sponsors and potential customers, the idea and innovative design is feasible from both a technical and business perspective. The main aspect of the wireless solution has been proven successful in both an underground and above ground setting. In the future, for our business feasibility we would need to ensure that our rover can compete with the current industry competitors on all aspects such as material quality, waterproofing, and marketing.
Competitors
These are our current competitors. They all use wired solutions in conjunction with heavy rovers as their main product.



Technical Specifications
| Dimension | 3.5 x 4 x 14 inches |
| Run Time | 2 hrs |
| Main Battery | 7.4V 5200mAh |
| MLink Battery | 3V (2x AA) |
| Max Motor Speed | 200 RPM |
| Gearbox | 1:48 |
| Weight | 3 lbs (with aluminum shell) |
| O.S. | Windows 10 |
| Control Distance | 100 ft (tested) | 900 ft (theoretical) |
| Control Latency | 5 secs |
| Controller (MLink) Frequency | 902-928 MHz |
| MLink bitrate | 57600 bits/sec |
| MLink Hardware Flow Control | RTS/CTS |
| Video Resolution | 600TVL | ~728×492 pixels |
| Video Frequency | 5829 MHz |
| Notes file format | .txt |
| Video File format | .mp4 |
Planned Future Improvements
- The use of aluminium sheet metal to make the body of the rover
- A custom PCB instead of our current complex wiring setup
- A higher resolution camera with a larger ISO range
- Better camera receiver
- Controllable gimbal for the camera
- Low control latency
- Custom wheels to keep the rover stable in pipes
- Longer battery life
- Distance tracking capabilities
Partners and mentors
Alan Sandwell:
Thanks to our Academic Advisor for constantly guiding us in the direction we needed to take the project in.
Jose Menjivar Hernandez:
Thanks to our Business TA for teaching us more about the economic side of engineering projects
Thomas Truong:
Thanks to our Technical TA for always making sure that we were on track with our project and introducing us to new technology we could use.
Hunter Hub:
Thanks for sponsoring the costs of the project without which we would not have been able to create the prototypes needed.
Aurora Wireless:
Thanks to their team for supplying us with their MLink wireless modems and helping us with integrating it with the rest of our project.
The Drain Doctor:
Thanks for giving us some much needed insight into how the industry works, and letting us use your shop for testing.
Our photo gallery