Project Category: Geomatics
Join our presentation
About our project
Data extraction and identification have been widely developed and applied in various fields. With the gradual development of road traffic data systems, road target identification and model establishment have broad application prospects. The scanning and identification of the curb points is an aspect of important application significance and can be implemented in areas such as snow removal and autonomous vehicle operation.
Therefore, our project aims to automatically detect and extract roadside curbs from large 3D LiDAR point clouds that may be uneven, unorganized, and/or noisy. The final deliverable will be a 3D model and/or export file displaying all the coordinates of curb points identified.
To accomplish these results, we broke the algorithms down into three components, pre-processing (sorting and removal of excess points), curb point identification, and curb refinement. The final stage provides and tests the results to be published as the final deliverable.
Meet our team members




Details about our design
HOW OUR DESIGN ADDRESSES PRACTICAL ISSUES
Our design attempts to address the difficulty of identifying curbs in autonomous applications specifically from LiDAR data. LiDAR point clouds are noisy and contain a high density of information. Curbs themselves are a very small portion of the actual road and point clouds making them very difficult to identify. So, our design aims to create a solution that can identify these curbs and, therefore, the road edge for autonomous applications such as snow removal or car parking.
WHAT MAKES OUR DESIGN INNOVATIVE
Data Filtering:
As the results of the implementation method are unpredictable during the research and planning stages, some innovative ideas were generated and completed in the process of implementation. Originally, it was determined that a density-based filtering method would be used to implement the filtering of the raw data. However, upon implementation, it was discovered that the results were not being filtered as expected. Thus, the incorporation of elevation histograms was introduced in order to yield filtered results that met the filtered data goal.
Curb Point Identification Thresholds:
In the curb identification process, we used a set of thresholds that, when met, would approve a point from the dataset as a curb point. However, the downfall with this is that the thresholds had to be changed whenever a new dataset was introduced. As a result, we attempted to implement the ability for the thresholds to change themselves based on the inputted dataset. Unfortunately, this avenue was unsuccessful and the thresholds must still be manually changed with each dataset.
WHAT MAKES OUR DESIGN SOLUTION EFFECTIVE
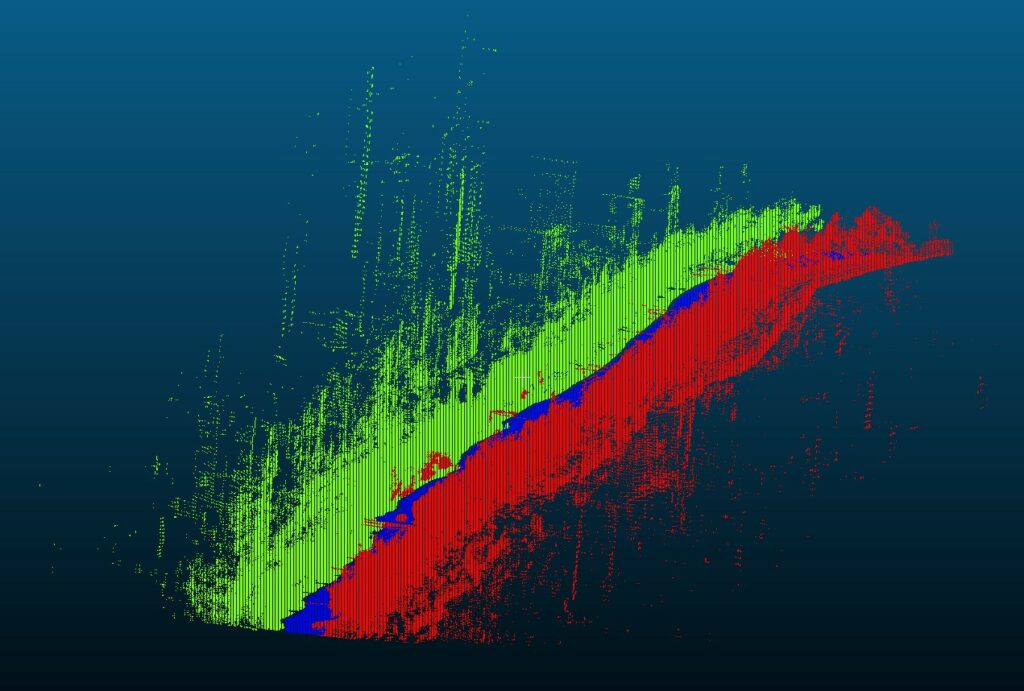
Elevation Histogram:
The use of the elevation histogram is highly effective at removing all the unwanted points above the ground. By classifying all the points into many bins, the ground points are maintained while all other points are removed.
Point Identification:
We use two primary relationships to identify curb points. The first is a difference in gradients which is basically a height difference comparison; however, this is not effective on its own. So, the second relationship of normal vectors is used to refine the curb point selection. Both these methods provide a value that is tested against a threshold.
Curb Refinement:
After the candidate curb points are identified in the above, we then need to refine the points as there are many non-curb points that may be identified. We use a random sample consensus (RANSAC) filter to remove all the unwanted points and obtain the final identified curb.
HOW WE VALIDATED OUR DESIGN SOLUTION
Qualitative:
The process of extracting curb data from a LiDAR point cloud was sectioned into three main segments, pre-processing, curb point identification, curb extraction, and curb modeling. For each section, the outputted results were visually analyzed and compared. This was done to ensure that each stage was producing results that were meeting expectations.
Quantitative:
Two quantitative methods, precision, and recall have been employed as a comprehensive evaluation to determine the validity of the identified curbs. These methods are determined from the true positive, false positive, and false negative values obtained from the curb modeling stage of the project.
Precision:
The precision or positive predictive value (PPR) denotes the proportion of the correctly identified curbs from the total detected amount.
A precision of 61.8421% was obtained for a portion of the identified curb points, which can be seen in the following figure. This precision value is only temporary as it only represents a small portion of the total number of identified points.
FEASIBILITY OF OUR DESIGN SOLUTION
Unfortunately, our final design is not feasible… We were successful in identifying curb points in clean data sets with minimal occlusions, however, we were not successful at creating a robust solution that worked when there are many occlusions in the data set. With the knowledge we have obtained, we believe that some new brainstorming is required where some image processing methods could possibly be implemented and applied to the problem.
Partners and mentors
We would like to thank our project advisor Dr. Ruisheng Wang for all the help he provided during this project period. His guidance and advice proved to be invaluable as we progressed through or work.
Our photo gallery
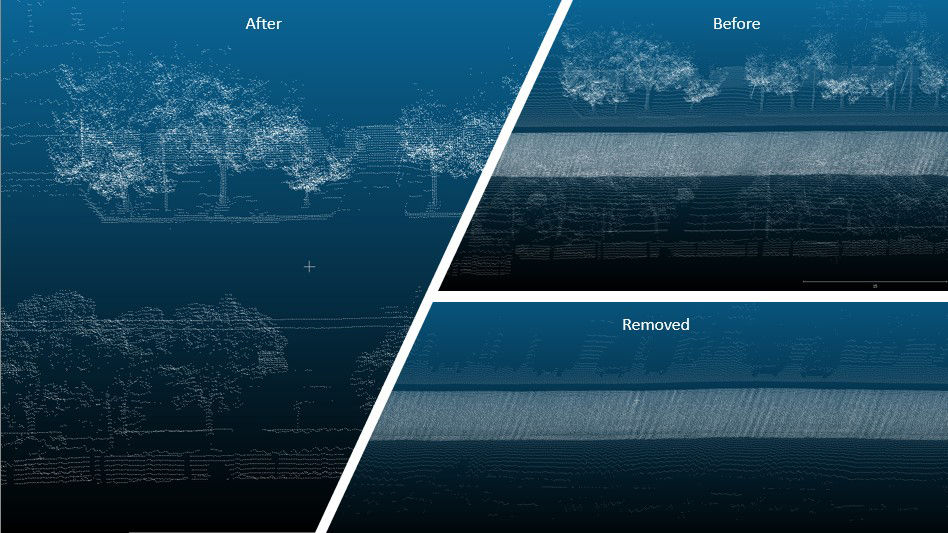
Here are a series of images that display the point cloud data in a variety of scenarios.
Before: prior to the removal of non-ground points.
After: The non-ground points that were removed.
Removed: The remaining ground points after data sorting and non-ground points removal.
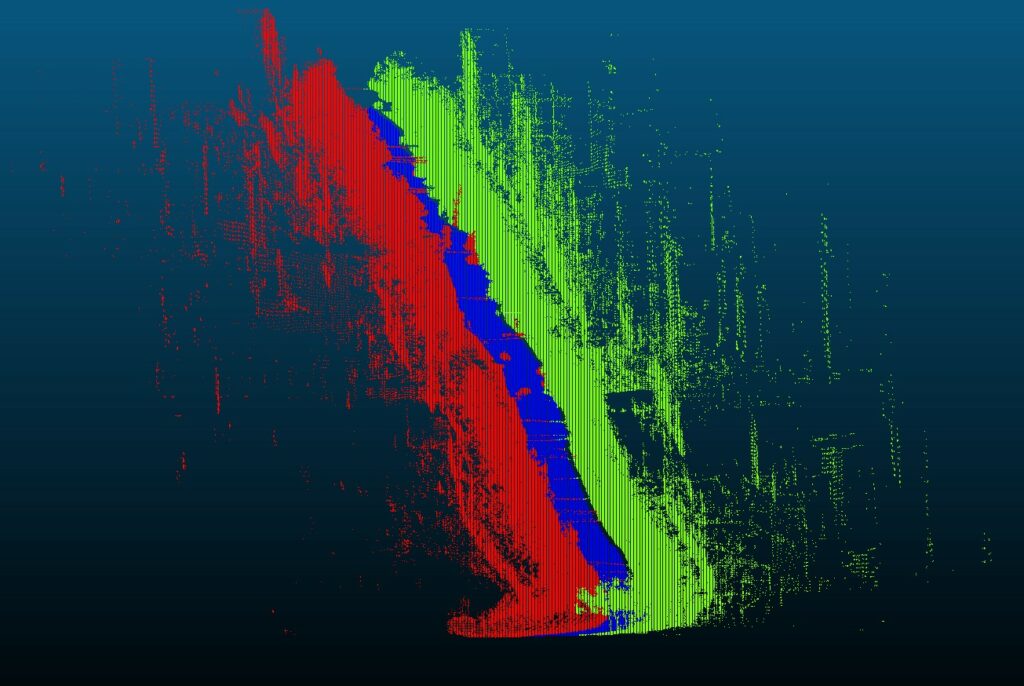
The above images display the raw LiDAR data prior to the implementation of the our curb identification program.
The following display the final identified curb points.