Project Category: Geomatics
Join our presentation

To join our presentation, click the link above or scan the QR code! The password is 347971.
About our project
Light Detection And Ranging, or LiDAR, is a method of remote sensing that uses emitted light pulses to measure ranges from the measurement unit to targets. These targets can include buildings, objects and terrain. Using LiDAR, we aim to develop an algorithm capable of detecting trees within the Town of Banff, and classify them according to key forestry parameters, such as location, height, tree type, and diameter at breast height (DBH). Using these parameters, the goal is to provide the Town of Banff with a more comprehensive list of trees for better inventory and forest fire prevention strategy.
Meet our team members
Our team, from left to right:
Alekhya Bhamidipati – Technical Lead (Algorithm)
Andrew Grab – Project Manager
Eric Ho – Technical Lead (LiDAR)
Nicholas Malbasa – Communications Manager



Details about our design
HOW OUR DESIGN ADDRESSES PRACTICAL ISSUES
Trees are a large part of every city and town. As such, it is important to have an inventory of trees for infrastructure planning, risk mitigation, and many other applications. By developing an algorithm that automatically finds and classifies all trees in a desired area, the time-consuming process of tracking trees becomes significantly more efficient, and consequently cheaper.
WHAT MAKES OUR DESIGN INNOVATIVE
Our project uses an algorithm to detect trees within the semi-forested Town of Banff. While most tree detection algorithms in urban areas use satellite remote sensing and aerial or ground LiDAR, our approach involves only aerial LiDAR scanning. Our solution involves the application and combination of two tree inventory algorithms, which are documented to have high accuracy in forested areas. Using the combination method, our solution takes the most effective parts of each algorithm to produce a balanced method of tree inventory that is both accurate and correct in detection.
WHAT MAKES OUR DESIGN SOLUTION EFFECTIVE
Using the combination method, our solution detects trees using a top-down nearest neighbor search, then checks the detected tree against a shape modelling RANdom SAmple Consensus (RANSAC) variant algorithm. The top-down approach allows for the majority of trees to be detected, and the modified RANSAC algorithm ensures few false positives, such as cars or walls, are identified as trees.
HOW WE VALIDATED OUR DESIGN SOLUTION
Our design consists of two algorithms combined into one. By performing the tree classification on the two precursor algorithms and the finalized combination algorithm, we can analyze the results of each and compare them to collected orthophotos and the existing Town of Banff database. A variety of test cases were chosen, specifically to account for both areas of high tree density, as well as areas with many man-made structures. For each test case, the number of trees found was documented and compared to the algorithm results.
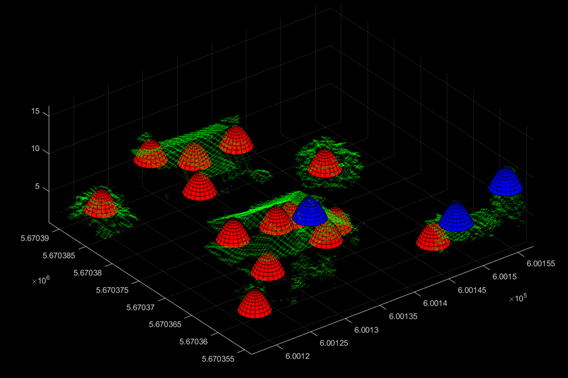
To measure the efficacy of the solution, the accuracy and correctness were calculated. The accuracy of the solution is measured by the number of false postives present in the dataset, while the correctness of the solution is dependent on the number of false negatives. False positives are points that have been classified as trees, but are not actually trees. False negatives are points that were not classified, when they should have been. A higher accuracy or correctness indicate fewer occurences of these errors. Examples of accuracy and correctness are shown in the following figures.
FEASIBILITY OF OUR DESIGN SOLUTION
The feasibility of the solution is contingent on the amount of time spent making the algorithm run as efficiently as possible. For instance, many of the errors for the 3 algorithms are tied to the presence of buildings. While it was possible to remove most buildings in the area, there is still a decent amount of urban infrastructure (streetlights, powerlines, etc.) that, if removed, would improve the accuracy and correctness of the solution. Additionally, the solution is limited by the number of points required to constitute a tree, and the assumption that the solution can isolate individual trees from other objects.
In its current state, our solution provides decent and feasible results, with the solution maintaining a balance between accuracy and correctness. The weighted average accuracy obtained is 82%, while the weighted average correctness is 76%.

Shown in Figure 4 is the results of our solution. Blue dots indicate a higher likelihood of being coniferous, while red indicates a higher likelihood of being deciduous or man-made structures, such as a building or power lines. Overall, our algorithm identified 26437 trees in the Town, and after applying the expected accuracy of 82%, the assumed number of correctly identified trees was approximately 21596. Accounting for the 76% expected correctness, the number of trees assumed to be missed is approximately 6915.
Partners and mentors
We would like to thank OGL Engineering for sponsoring our project, as well as providing the data used to perform the tree inventory algorithm on. We would also like to thank Sam Rondeel for his advice and continued support throughout our project, as well as our Town of Banff contact Jon Ball for providing project ideas, suggestions, and Town of Banff data.
Our photo gallery

A full city block of the Town of Banff 
A full city block of Banff with buildings excluded 
A single property lot with buildings removed 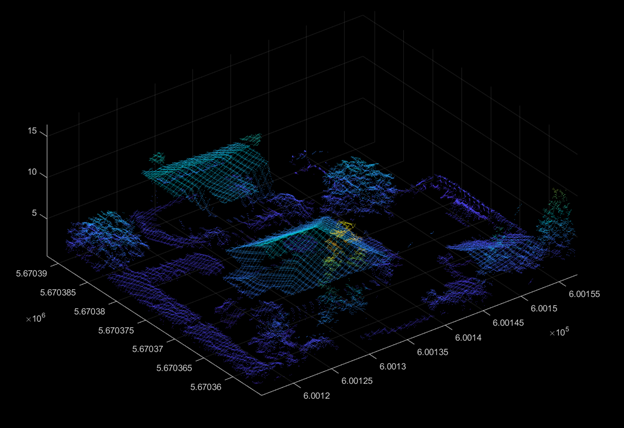
A single property lot 
A rural classified test case 
Trees within a parking lot 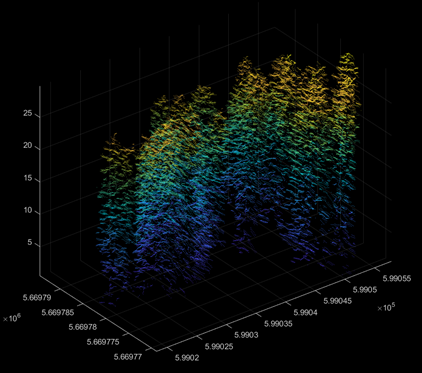
A cluster of trees 
A full street block along Downtown Banff

Ideal Urban 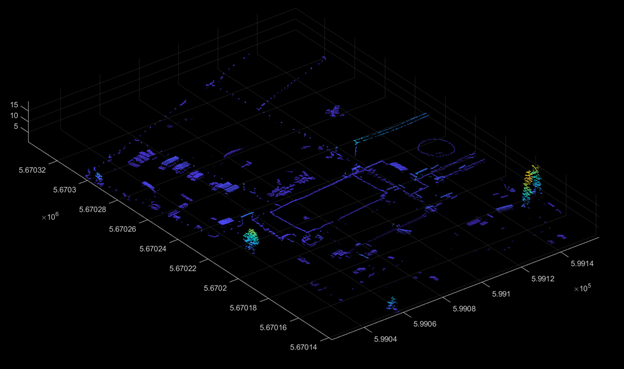
Developed Urban 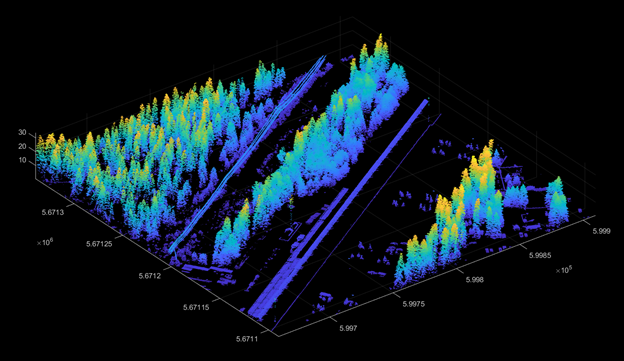
Developed Rural 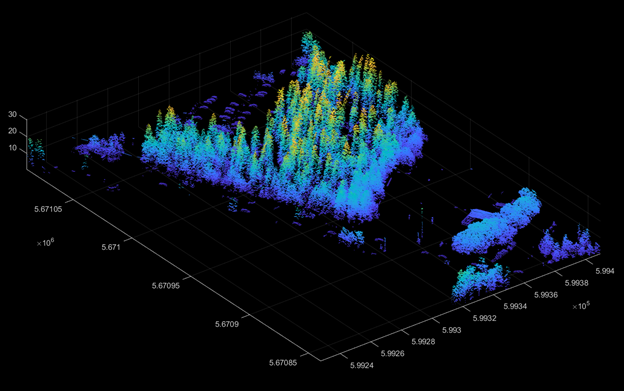
Underdeveloped Urban 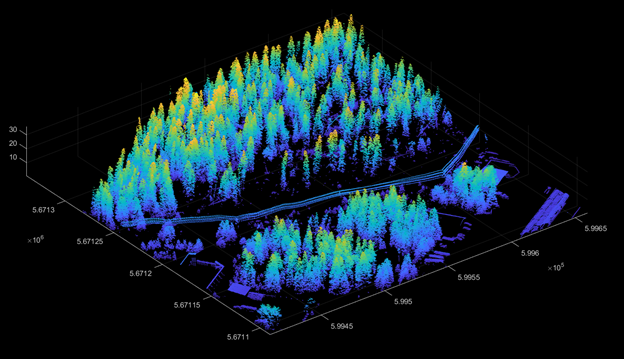
Rural Transition to Urban 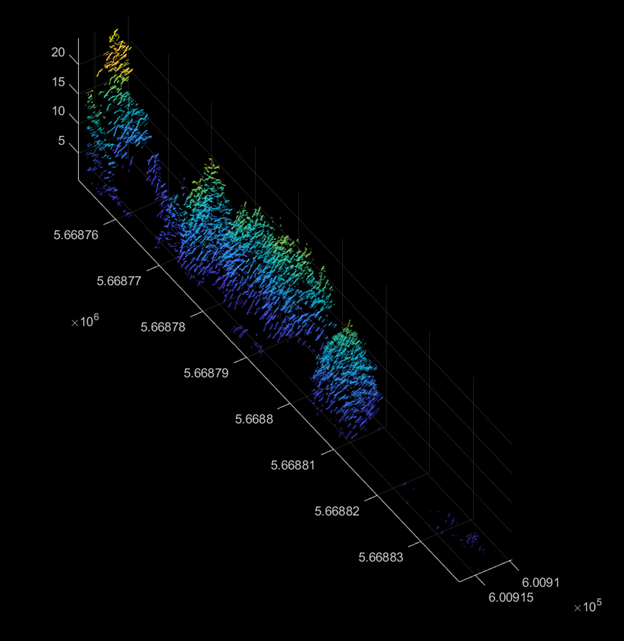
Small Defined Rural 
Small Undefined Rural 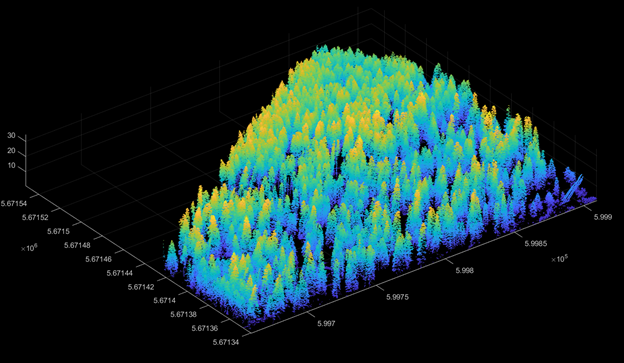
Ideal Rural 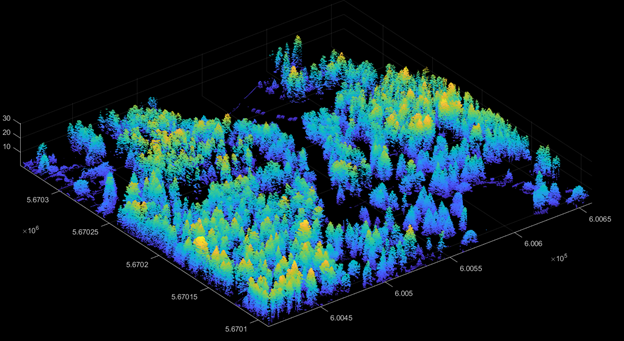
Underdeveloped Rural
