
Project Category: Mechanical
Join our presentation in person at Booth 26
About our project
The most common tool for kinematic assessment is the optical motion capture (MoCap) system. This method is non-ideal due to its high cost and low accessibility. The AMKAT-C project focused on creating a device that can be used by performance athletes, clinicians, and physiotherapists as an alternative to motion capture.
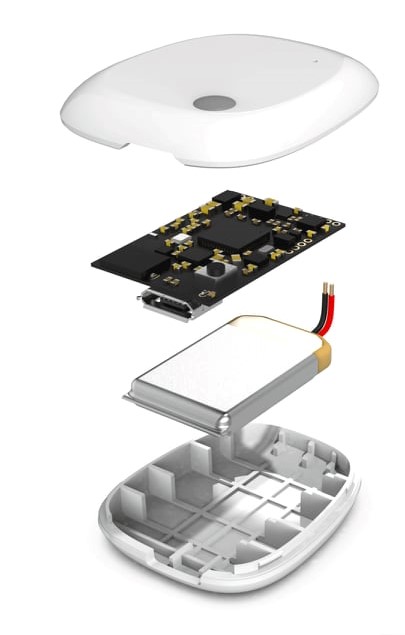
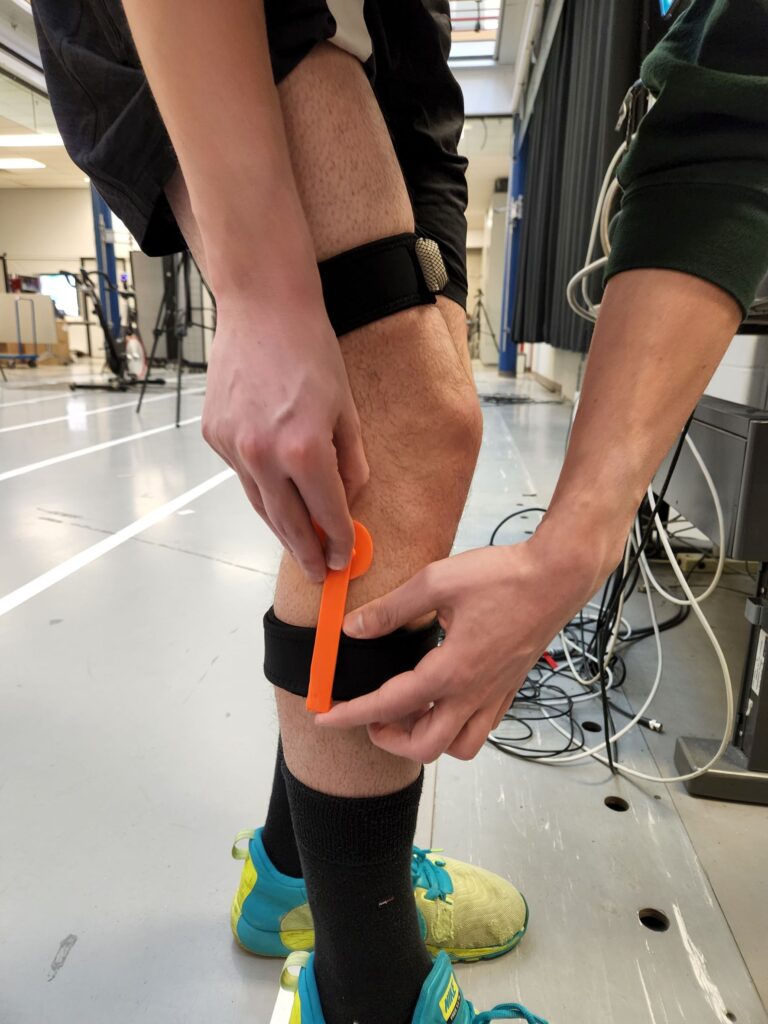
Analyses of sensor options as well as housing and attachment designs were conducted. Inertial Measurement Units (IMUs) were chosen for their availability and alignment with the design constraints. A hinged, 3D printed housing was designed for ease of use, strength, and weather resistance. It was then fitted to a commercial neoprene pocketed strap. Data collection consistency was improved by a tool used to align the device with anatomical landmarks relative to the knee joint.
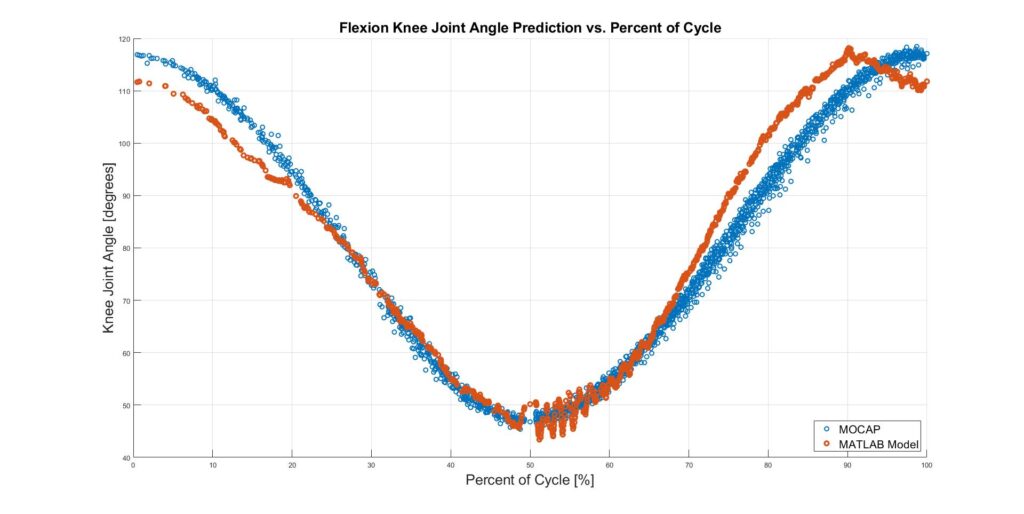
IMU data was compared to the flexion-extension knee joint angle calculated using the traditional optical motion capture method. Using this data, a multivariable regression-based angle prediction equation was created. This equation takes acceleration data from the IMUs and predicts the knee joint angle at a given cycling cadence, allowing for out-of-lab kinematic cycling analysis.
Meet our team members

Project Manager

Prototyping, CAD, and Manufacturing Subteam

Motion Capture Lead

Prototyping, CAD, and Manufacturing Subteam

Software Lead
Details about our design
HOW OUR DESIGN ADDRESSES PRACTICAL ISSUES
The current standard for musculoskeletal kinematic assessment is optical motion capture systems. Although this method of kinematic analysis is commonly used and proven as accurate, it comes with various drawbacks. Motion capture systems cost thousands of dollars for both high-definition infrared cameras required for testing, and the accompanying integrated analytical software needed for kinematic modelling and movement tracking. This cost is a major hinderance for rehabilitation centers or training facilities trying to acquire them. Furthermore, testing is confined within the distances that the cameras can detect the anatomical markers placed on the moving subject, limiting examinations to allocated laboratory spaces. Lastly, these systems require extensive training to both calibrate and position cameras appropriately and have lengthy processing times to track marker position data and reconstruct kinematic models.
This project design allows for a “take home” system that would measure musculoskeletal kinematics of outdoor cycling in the field, using more affordable, easy-to-use, wearable biosensor technologies. For rehabilitation applications, a subject could be able to monitor their progress throughout a rehabilitation protocol by tracking their knee joint mobility. Similarly, performance athletes would be able to monitor and analyze technique during training to optimize performance.
WHAT MAKES OUR DESIGN INNOVATIVE
Wearable outside of laboratory environments.
– Offers an alternative to traditional methods, which are restrained to specific in-lab environments.
Tracks realistic movement of users.
– Cycling outside of the lab promotes a natural, less restricted motion.
Affordable
– Compared to motion capture systems or similar commercially available systems, our design introduces significant cost savings.
Eliminates manual motion tracking and data processing
– MATLAB code offers an easy-to-use method for converting data collected from the IMUs directly into the flexion-extension angle of the knee joint.
WHAT MAKES OUR DESIGN SOLUTION EFFECTIVE
Joint angle comparisons were performed using the highest standard Vicon motion capture system in the Human Performance Lab at the University of Calgary. Subjects were instructed to pedal at a variety of cadences, which offers an expanded range of data for analysis. The low-cost, 3D printed housing design offers effective strength and weather resistance.
Knee joint angle throughout cycling is calculated using the algorithm. It was shown to have significant correlation (R2 = 0.961) when compared to angles derived from motion capture. Knee joint angle can be predicted within five degrees which indicated success of the design comparable to other IMU based kinematic studies.
HOW WE VALIDATED OUR DESIGN SOLUTION
The AMKAT-C system underwent the following quantitative and qualitative assessment:
Prototype Sensitivity and Drift Test
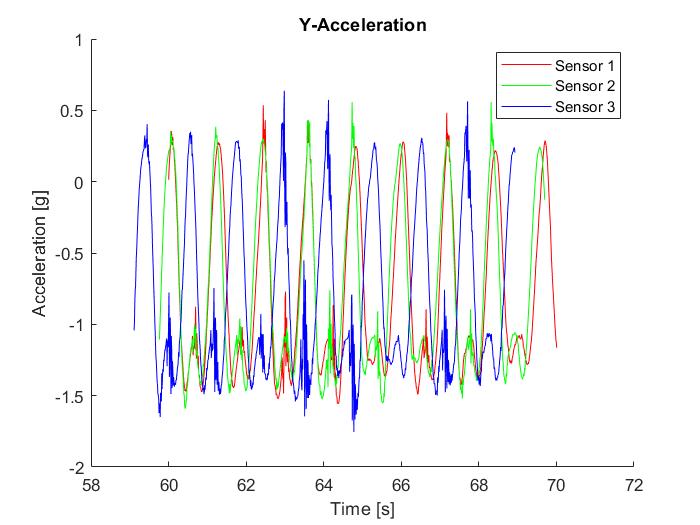
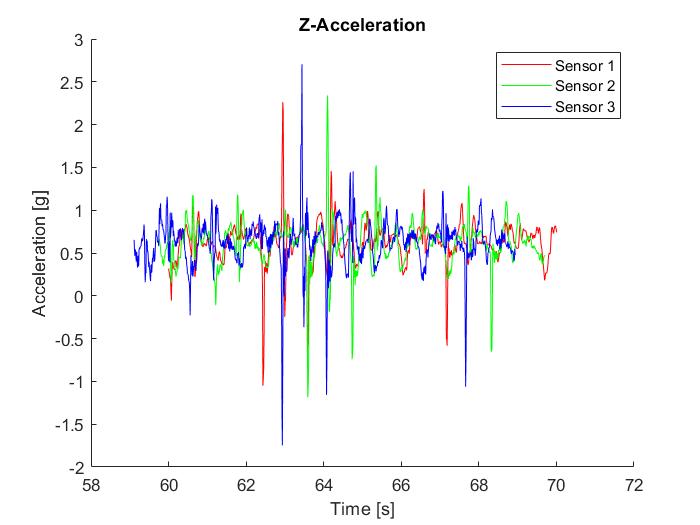
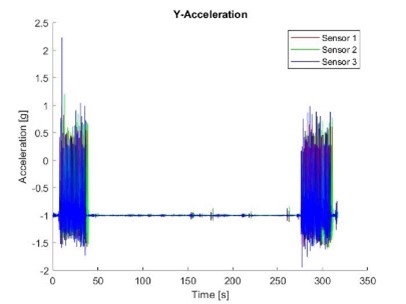
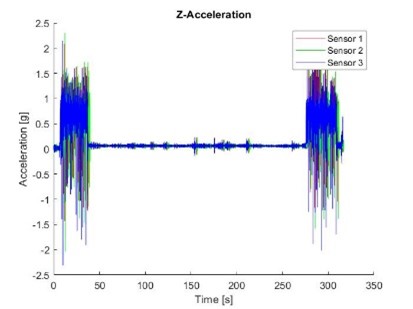
To determine which prototype route to further pursue, a testing rig was built to simulate consistent motion between three sensors, each with their own attachment method pictured below. Sensor 1 was placed directly into the pocket on the strap, Sensor 2 used a case to shim the sensor within the pocket, and Sensor 3 used a case attached externally to the strap using Velcro. Two tests were performed with this rig. In the first, the rig was moved cyclically to see how the different prototypes affected acceleration readings; In the second, the sensors were tested for drift over two minutes.

The first set of figures shows the results of the first test. Sensor 1 and 2 performed similarly, but Sensor 3, with external attachment, was much more inconsistent. Therefore, the choice was made to pursue a housing prototype that fits in the pocket of the strap.
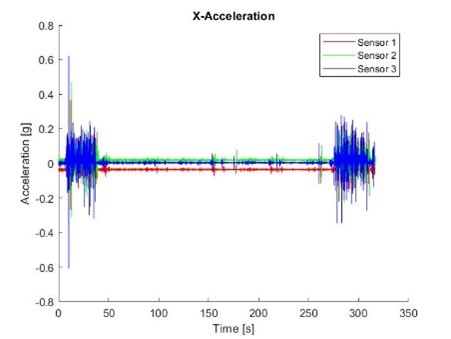
The next set of figures shows the results of the second test. As illustrated below, there was no observable drift over the course of the two-minute trial from any of the sensors.
Strap Alignment Pre/Post Trial Test
To validate the use of the commercially available strap, a series of trials were conducted to ensure there was no slippage during use, affecting alignment. The image to the right shows the red lines marked on the edge of the straps, and that the straps did not move over the course of the full experimental testing protocol.

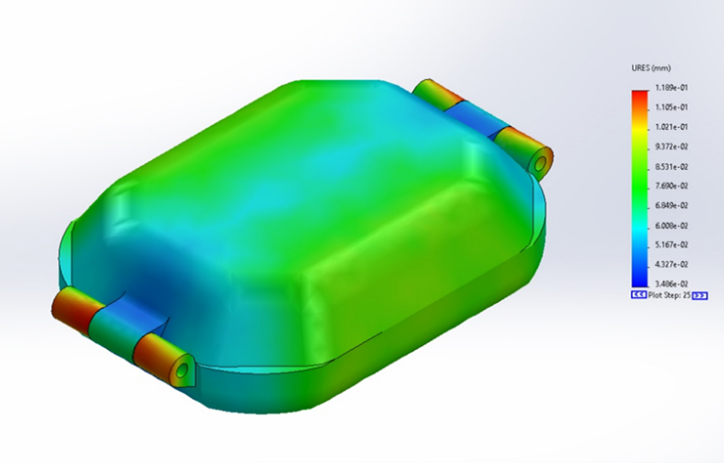
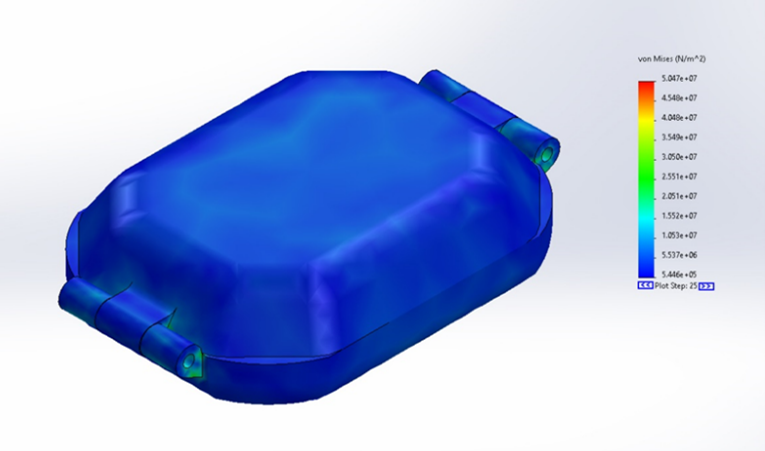
Prototype 2m Drop Test – FEA
A drop test was simulated using SolidWorks software. It was assumed that the case landed flat on its bottom half and was dropped from a height of 2 meters. The bottom of the case was chosen for the impact location as it has the least amount of material, and is the weakest section of the design.
The results of the study showed that the plastic material did not yield and deformed only 0.12 mm.
Ingress Protection IP44 Test*
Since the AMKAT-C system can be taken outdoors, the housing was designed to provide IP44 protection to protect from water splashes and particulates. The housing was designed with a groove for an O-ring to provide a static seal with 40% compression. This test was not able to be performed due to shipping delays for O-ring components.
Comfort/Ease of Use
A 5-Point Likert Scale was also used to qualitatively assess and evaluate the various housing prototypes and attachment methods being explored. Parameters including comfort and ease of use were evaluated and inputted into a decision matrix to choose the final prototype.
MATLAB Algorithm Validation
The AMKAT-C algorithm and regression based joint angle prediction model was built with thousands of data points from multiple trials. To validate the algorithm, an additional data set was fed into the prediction model.
The multivariable regression formula was developed as follows:
θIMU = a*IMUay + b*IMUaz + c*IMUby + d*IMUbz + Constant
The a, b, c, d coefficients and constant were obtained to minimize the error of prediction:
Error = θIMU – θMOCAP
Results:
θIMU = 30.46*Thighay + 1.07*Thighaz – 12.08*Shankaz + 49.08*Shankay + 131.37
Regression analysis was performed and an R2 value of 0.961 was determined for the system. Moreover, the analysis showed that MATLAB model was accurate in predicting the flexion extension knee joint angle with an RMS error value of 4.849 degrees.
FEASIBILITY OF OUR DESIGN SOLUTION
The ability for this device to collect repeatable data and predict knee joint flexion-extension angle within an acceptable margin of error, is evidence of its feasibility. This project has built the framework for further data collection and data processing refinement, with ethics approval for future participant testing sessions.
The total cost of the AMKAT-C system is $345.96 which includes the following expenses:
- 2x MBIENTLAB MMS+ IMU Sensor: $141.99 ea.
- 2x Pocketed Strap: $16.50 ea.
- 2x IMU Case: $11.99 ea.
- Alignment Tools: $5.00
Partners and mentors
AMKAT-C expresses its sincere appreciation for the continued support from Dr. Amin Komeili, Dr. Janet Ronsky, Dr. Philip Egberts, and Malcolm Macdonald. They provided valuable insight and constructive suggestions that guided us throughout the development of this project. Additionally, special thanks are extended to members of the Human Performance Lab for providing Vicon motion capture system training and the University of Calgary Active Living Centre for lending us a stationary bike for data collection.
Our photo gallery










References
[1]”MetaMotionS – MBIENTLAB”, Mbientlab.com, 2022. [Online]. Available: https://mbientlab.com/metamotions/.
