Project Category: Mechanical
Join our presentation!
About our project
A person’s gait (walking) pattern provides useful insight into their musculoskeletal, cardiovascular, and neurological health. Tools that can accurately analyze gait can serve as diagnostic and rehabilitative aids to identify issues such as joint abnormalities or even in the early detection of cognitive diseases. The parameters measured by gait analysis tools vary from step parameters such as stride length, kinematic parameters such as knee joint angle, and kinetic parameters that quantify the forces generated when walking.
Currently, gait analysis is primarily performed using video studies or optical motion capture (OMC). The former analysis method relies on specialized knowledge and lacks accuracy in data collection, limiting its flexibility and applications. The latter analysis method is incredibly accurate, but also requires specialized anatomical knowledge along with expensive equipment and software.
Our project works towards addressing several of the drawbacks in the two aforementioned analysis methods by providing an affordable, wearable gait analysis system that remains user-friendly, highly accurate, and offers easier post-processing. We use two inertial measurement units (IMUs) placed on the thigh and shank to determine the wearer’s knee joint angle and identify key events in the wearer’s gait cycle. Because the two IMUs must be vertically aligned for optimal data capture, we’ve developed an alignment device that a layperson can use to ensure correct placement as well as a housing for the IMUs so that the device can be used in outdoor environments. Finally, we developed and trained a recurrent neural network that can be used to compare an individual’s gait to an individualized normal gait pattern to aid in the identification of any movement abnormalities.
Meet our team members



Amnah Saleem
5th year mechanical engineering student
Housing design, OMC
Taylor Kergan
5th year mechanical engineering & physics student
Data processing, neural network
Michael Schultz
4th year mechanical engineering student
Alignment device design
Franco Tapia Lopez
4th year mechanical engineering student
Project management
Details about our design
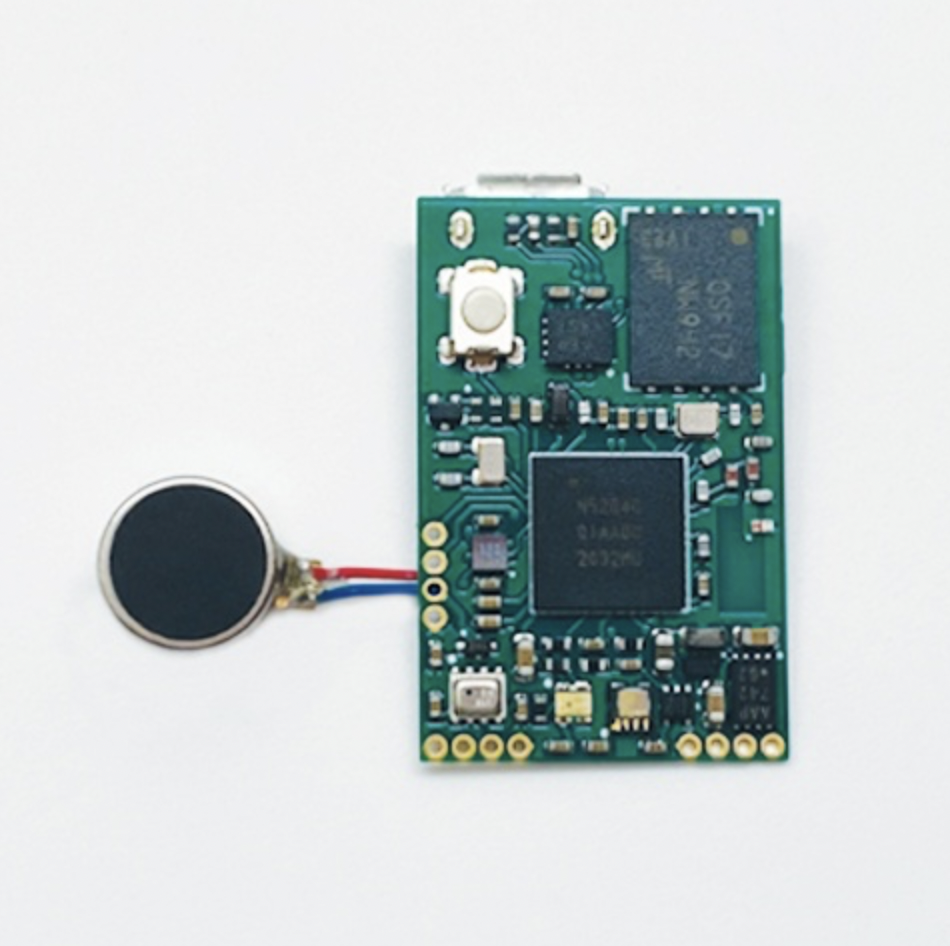
IMUs (x2)
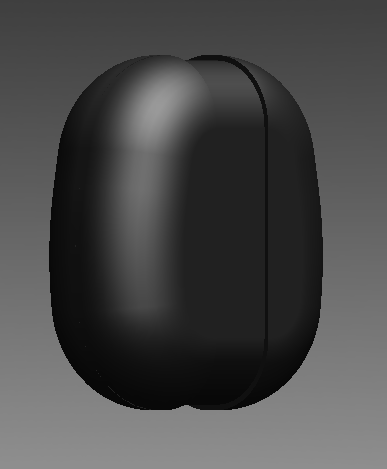
Housing
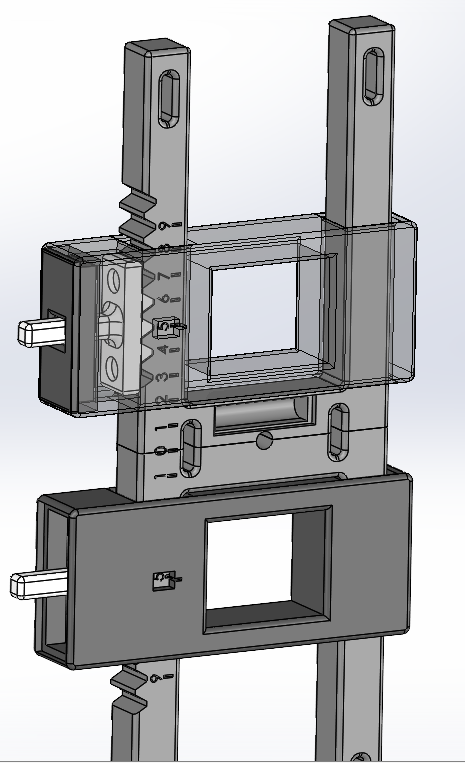
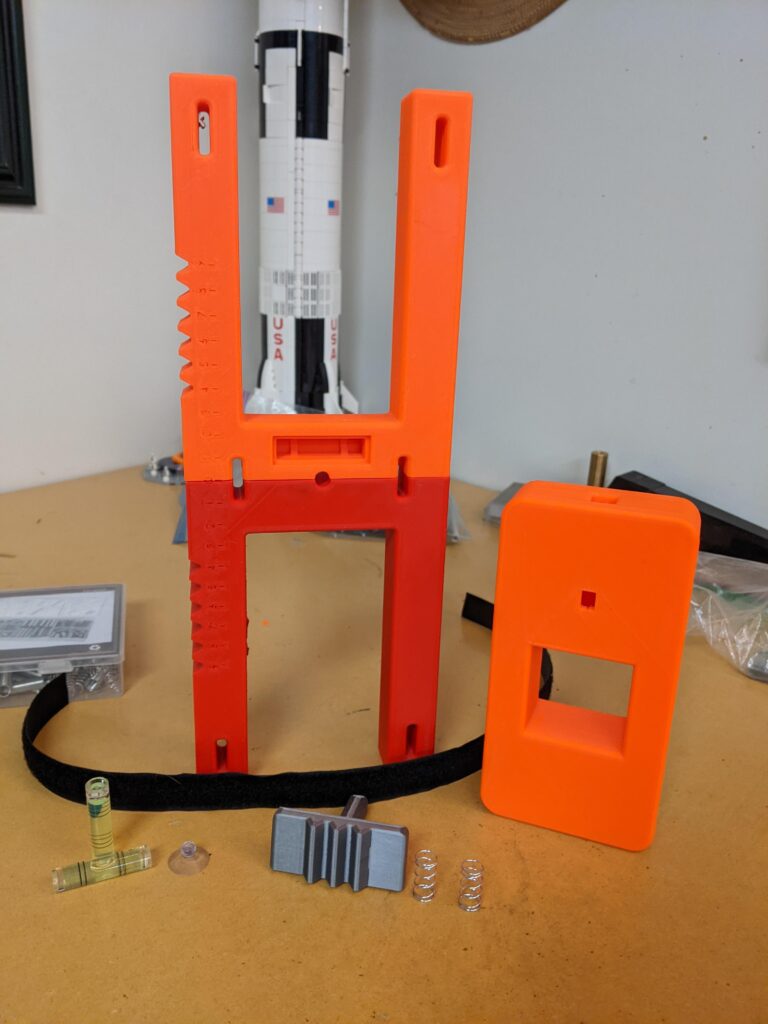
Alignment Device
HOW OUR DESIGN ADDRESSES PRACTICAL ISSUES
- Accuracy: OMC systems are considered the gold standard for movement analysis. Inertial systems such as ours have errors of less than 5% when compared to OMC.
- Ease of data collection: OMC systems require significant setup, calibration, and tear-down time, and require individuals to have knowledge of anatomical landmarks. Our system is simple for the end-user to align and, once the IMUs are placed, data collection can begin immediately.
- Streamlined post-processing: Processing the kinematic data output from OMC or video recordings takes time and knowledge of human biomechanics. We created a script to which the system user can input the file containing their gait data (which is output from the IMUs and can be sent to the user’s phone) and receive knee joint angles with no additional work required by them. This allows for speedier gait analysis, making it a much more realistic tool for medical practitioners and researchers to deploy as needed to identify discrepancies, track physical therapy progress, or conduct population studies.
- Affordability: OMC systems can run from $20,000 into the millions. Our system costs less than $500, opening up gait analysis to individuals outside of well-funded laboratories.
WHAT MAKES OUR DESIGN INNOVATIVE
Our design is able to be used by those without prior knowledge in biomechanics or motion capture and has a relatively low upfront cost. The calibration device takes the thinking out of aligning the IMUs, while the housing protects the IMUs from debris and moisture outside, allowing for outdoor data collection, and the post-processing pipeline we’ve created allows for plug-and-play kinematic analysis.
WHAT MAKES OUR DESIGN SOLUTION EFFECTIVE
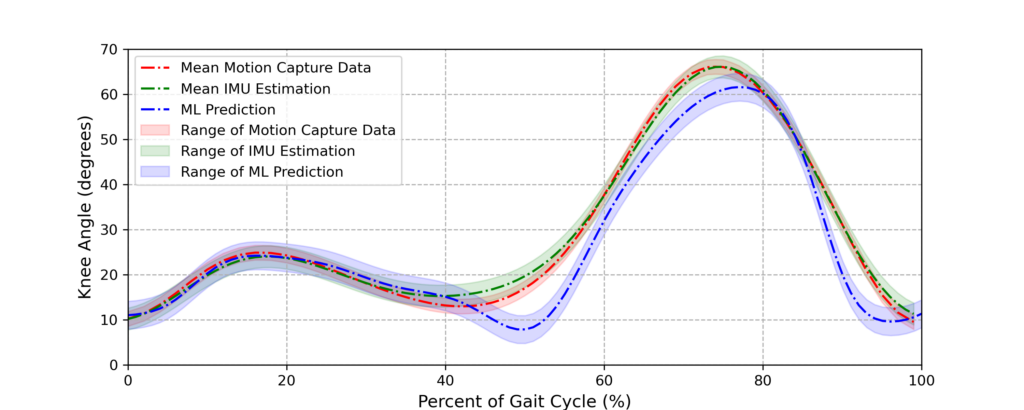
The two IMUs, mounted on the thigh and shank, are used effectively to calculate the flexion-extension knee joint angle using two methodologies, namely through an integration method and a recurrent neural network. These methods are compared to the gold-standard method (OMC) of finding knee joint angle.
The below figure shows the IMU methods employed in a 10 step walking trial where IMUs and OMC were used in tandem for data collection. It can be seen that the integration method matches more closely to OMC than the recurrent neural network, however it is expected that with more training data the recurrent neural network may be able to predict to a similar accuracy. For this trial the root squared mean error (RSME) of the IMU integration methodology was 1.65° and 9.15° for the recurrent neural network.
HOW WE VALIDATED OUR DESIGN SOLUTION
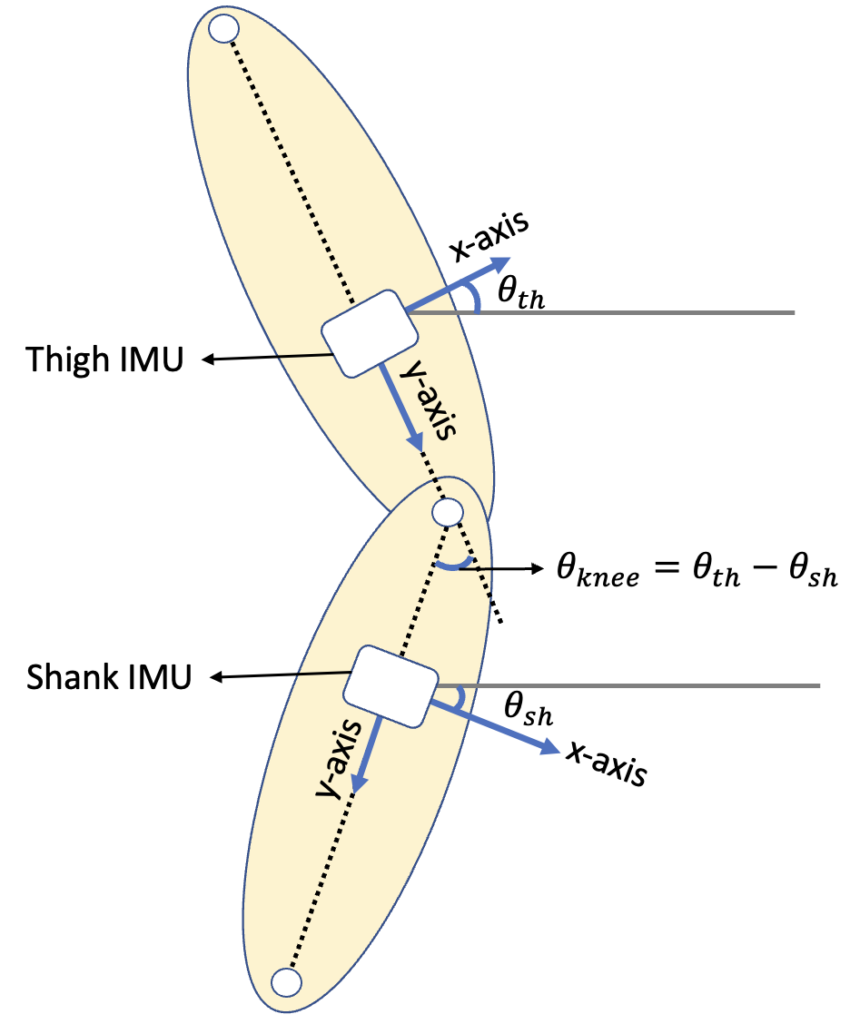
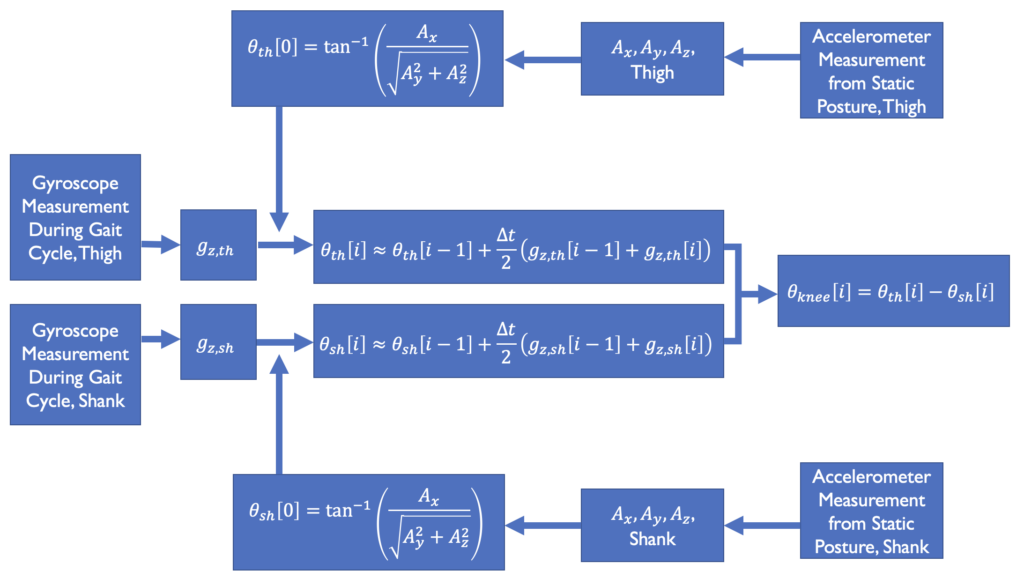
The IMUs are placed on the thigh and shank using the alignment device for data collection during the gait cycle. Once the data is collected from a walking trial, an IMU integration methodology is employed to estimate the flexion-extension knee joint angle. The methodology employed uses the accelerometer as an initial angle estimate and then the gyroscope data for the walking knee angle estimation. The recurrent neural network is employed in Python using the Keras library. A recurrent neural network was chosen since it is most suited network for sequential data analysis. The OMC knee angle is calculated using the conventional gait model.
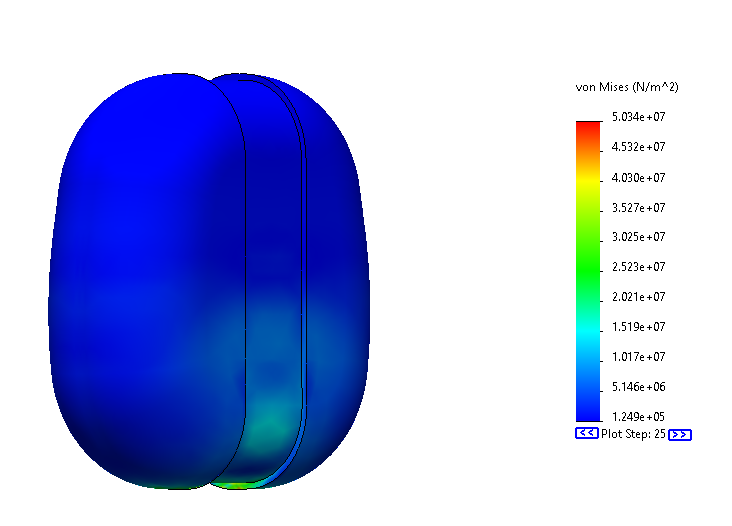
We validated the housing design using a tool called finite element analysis. Essentially, we used a dynamic simulation to model the stresses the housing would undergo if it was dropped from different heights, with 2m being the maximum tested and the one shown here. Using this simulation method, we confirmed that the housing would not break or deform significantly when dropped, and that it was able to absorb the energy from impact.
FEASIBILITY OF OUR DESIGN SOLUTION
We consider our design solution feasible for the following reasons:
- The system components are readily available: the alignment device and housing are 3D printed PLA, velcro strips needed to band the IMUs onto the leg are readily found in hardware supply stores, and IMUs are a common type of sensor with a variety of options available online
- The system is affordable: The IMUs are $130 CAD, a full roll of PLA filament can be found for less than $30, and the velcro needed was $15.
- The system is open source: The IMUs output data in a standard file format, and our post-processing script is written in Python, so it can be edited and built upon as needed.
- The system is accurate: Our IMU data matches closely with data from optical motion capture systems.
Partners and mentors
We would like to thank Dr. Amin Komeili, Dr. Bill Wannop, Dr. Alex Ramirez-Serrano, Dr. Leping Li, and Mr. Malcolm MacDonald for their valuable advice and support throughout our design process.
Our photo gallery


References
- Whittle, M. (2007). Gait analysis : an introduction. Butterworth-Heinemann.
- Chen, S., Brantley, J., Kim, T., & Lach, J. (2012). Characterizing and Minimizing Synchronization and Calibration Errors in Inertial Body Sensor Networks. 5th International ICST Conference on Body Area Networks. ACM.
- Seel, T., Raisch, J., & Schauer, T. (2014). IMU-based joint angle measurement for gait analysis. Sensors (Basel, Switzerland), 14(4), 6891–6909. https://doi.org/10.3390/s140406891
- Ma, X., Liu, Y., Song, Q., & Wang, C. (2020). Continuous Estimation of Knee Joint Angle Based on Surface Electromyography Using a Long Short-Term Memory Neural Network and Time-Advanced Feature. Sensors, 20(17), 4966.
- MbientLabs (2021). MetaMotionsS Product Specification.
