Project Category: Mechanical
Join Our Presentation and Ask Questions!
April 13, 2021 10:00 AM – 12:30 PM
About our project
The current heavy-lifting drone’s payload carries ability is proportional to its size. For example, the xFold Dragon x12 RTF U11 Drone shown in the figure below can lift a payload up to 45kg, but its size is about 1.3m long and 1.5m wide. This drone has no problem when operating in an open space, such as a playground or football field, etc., however, it is not ideal to operate in a tight space, such as a living room.

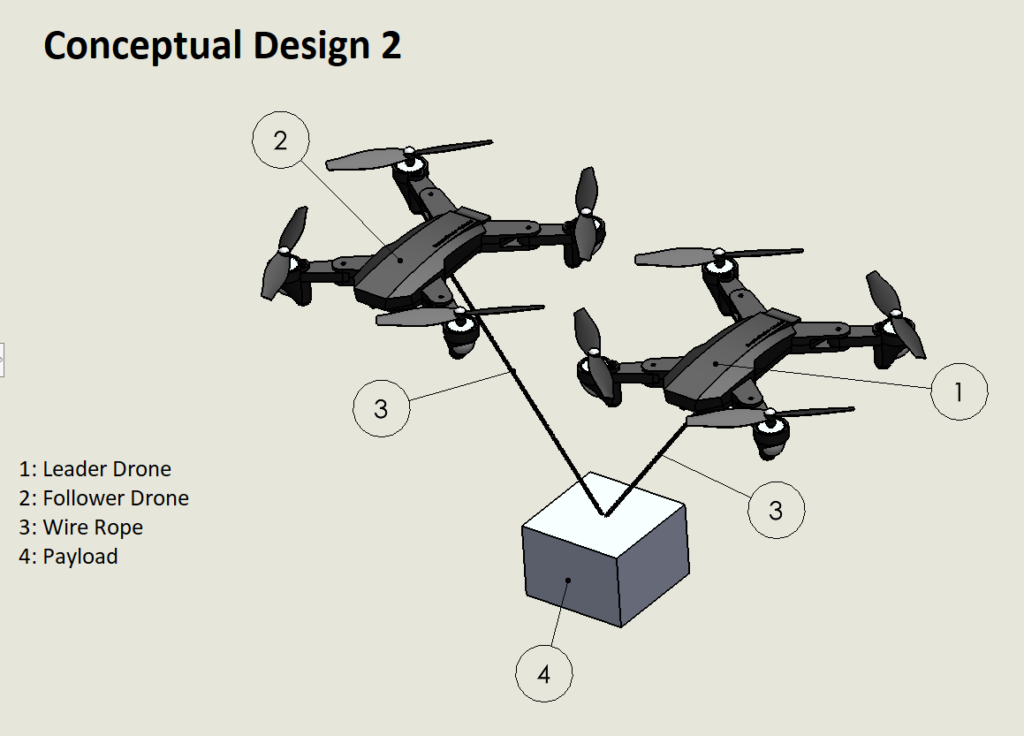
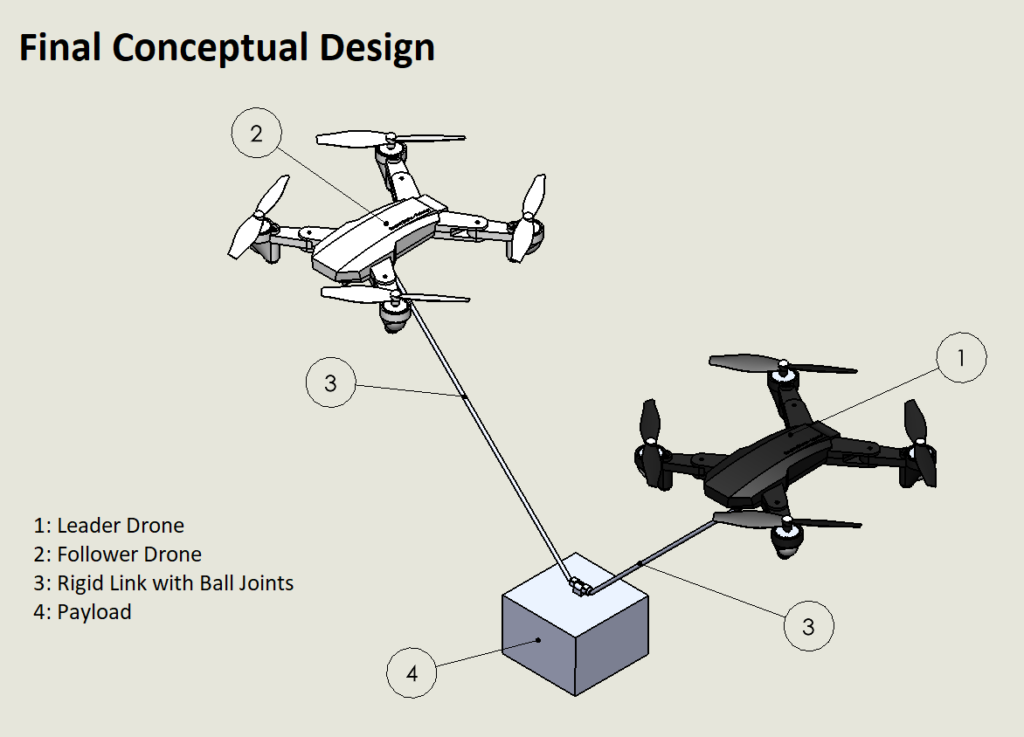
One of the solutions is to use multiple smaller drones to perform the payload carrying duty. Our goal of this project is to design control systems that allow the single operator to control multiple drones to carry the payload. The swarm drone control system will use the hierarchical swarm method, which means the operator will only control the movement of the leader drone, and the follower will track the leader’s position through wireless communication to achieve the movement of the swarm. The swarm is autonomous, which means it will reach the designated position set by the operator. Last but not the least, an obstacle detection system and a fail-safe mechanism are included to increase the safety of the drones during the operation.
In this project, the team would like to exam the performance of the swarm drones when carrying a payload in a room. This project is focused on the swarm drone’s accuracy, which can be accomplished through the design of control systems. Due to the time limitation of the capstone project, the final design will not include a mechanism to pick up and drop the payload, and the swarm will only consist of two drones in total, however, a swarm of 2-4 drones can be easily achieved in the future if this project is successful.
[1] F. Pure, “xFold Dragon x12 RTF U11 Drone,” 2020. [Online]. Available: https://factorypure.com/products/xfold-dragon-x12-rtf-u11-drone-12-propellers-u11-motor-for-heavy-winds-combo-new.
Meet our team members

Frank Yang
Swarm Position Control System Design

Jinghao Zhou
Obstacle Detection System and Fail-Safe Mechanism Design
Yehya Hennawi
User Interface Design

Fahim Beriwala
3D Animations Creation and Design Verifications

Jerry Yang
3D Modeling and Material Test

Raakin Bhatti
Swarm Control Logic Flowchart Design
Details about our design
How Our Design Addresses Practical Issues?
First responders always face dangers when they rush to a disaster site. They are risking their lives in order to save others. In a scenario where an earthquake hit a city, people might find themselves trapped under heavy objects, unable to move, say a bookshelf on the 10th floor of a building. Swarm drones could then be deployed to rescue the person trapped by lifting the bookshelf and escorting them to safety.
Our design can:
- Replace the traditional heavy lifting drone for payload-carrying duty
- Operate smoothly in indoor environments
- Potential applications in search and rescue missions

What Makes Our Design Innovative?
In a relatively new market where Unmanned aerial vehicles (UAVs)/drones are being developed and their design enhanced, there has not been a commercially available swarm drone design that operates in an enclosed space to perform the payload-carrying operation. In this project, the team first developed a position control system to allow the single operator to control the movement of the swarm, then the team applied 0.16 kg of the payload to the drones and conducted the engineering analysis. In addition, the user interface, obstacle detection system, and fail-safe mechanism are also developed to ensure the swarm drones can operator smoothly and safely in the required space.
What Makes Our Design Solution Effective?
Since the swarm was designed specifically for the indoor environment, the drone’s size needs to be small enough to operate smoothly. In addition, it also requires the design to:
- Allow for accurate control over the drones.
- Detect the obstacles to avoid collision during the flight.
- Account for unexpected malfunctions to protect the drones.
Our design included all the above requirements. The size of the drone is 0.21m by 0.22m by 0.056m, thus, the operator will have an easier time controlling the drone. The designed position control system of the swarm has a very small amount of overshoot, therefore, providing more accurate control of the swarm. In addition, the design includes an obstacle detection system that allows the drones to come to a stop to avoid potential collision during the flight. Also, the control system has a built-in failsafe mechanism that forces the drones to descend slowly to the ground in case of an unexpected malfunction, such as when the follower drone is not able to track the leader’s position. Last but not the least, the user interface was developed to allow for effective and efficient control of the swarm from the operator’s end.
How We Validated Our Design Solution?
To evaluate our design of the swarm drones, our team conducted different simulated tests through Simulink, SolidWorks, and CoppeliaSim. A summary table of our defined measurement of success can be found below.
Measurement of Success:
| Weight of Payload | 0.16 Kg | Simulink+ SolidWorks |
| Operating Space | 9m×7m×3m | Simulink+ CoppeliaSim |
| Acceleration Limit | ≤0.1 m/s^2 | Simulink+ CoppeliaSim |
| Distance between Obstacle and Swarm | 0.4m<d<0.6m | Simulink+ CoppeliaSim |
| Distance between Drone | 0.4m<d<0.6𝑚 | Simulink+ CoppeliaSim |
We conducted five tests in total to validate our design:
Function Tests
- Flight Test
- Overshoot Test
- Material Test
Performance Tests
- Obstacle Test
- Drones Distance Test
Flight Test
For the flight test, we applied a random position signal in each direction separately to the swarm to verify the basic flight capability and acceleration limits when carrying full amount of weight. For example, for the x-direction test, the drones fly forward in the x-direction with the payload, come to a stop, and then fly back to their starting point. This is repeated in the y and z directions.

Overshoot Test
This test validates the operating space specification by checking whether the drones will collide with the walls due to overshoot. The drones started in the middle of the room with the payload, fly to the right wall and then fly around the inside perimeter of the room before returning to the center again. The drones also stop and change altitude at certain points during the test so that we can check the overshoot in the z-direction as well.

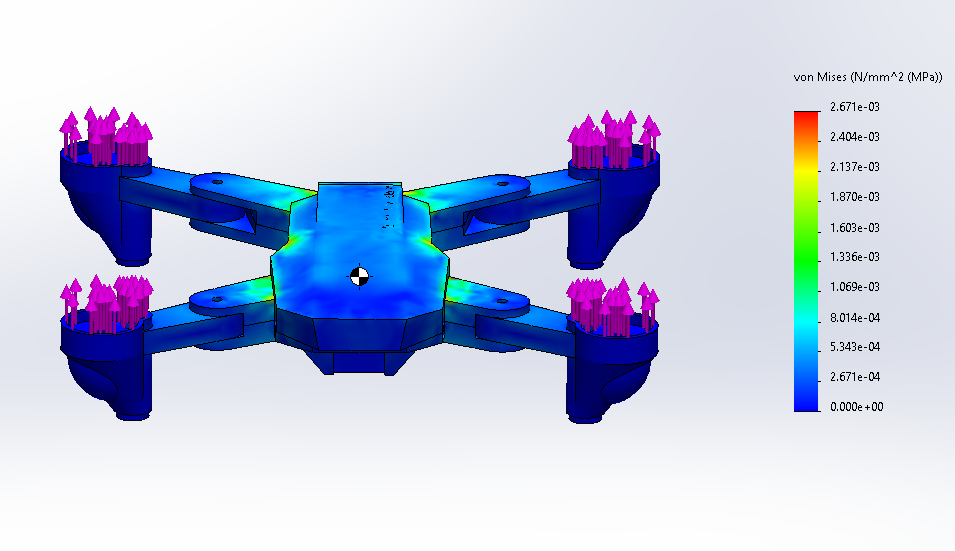
Material Test
The purpose of the material test is to verify the selected material for our drones whether will fail when performing the designed tasks. The materials to be tested are Carbon-fiber reinforced polymer (CFRP), and Thermoplastic(ABS Plastic), which are the most common materials for manufacturing small-sized UAVs. Two separate tests are conducted:
1. To verify if the drone’s arm will cause any failures when it’s at maximum thrust
2. To verify if the drone’s base will cause any failures when it’s carrying the full amount of payload.

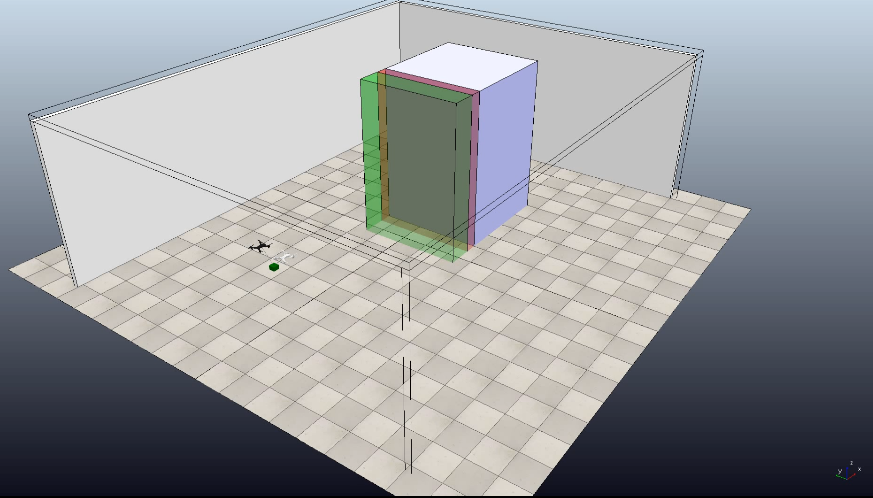
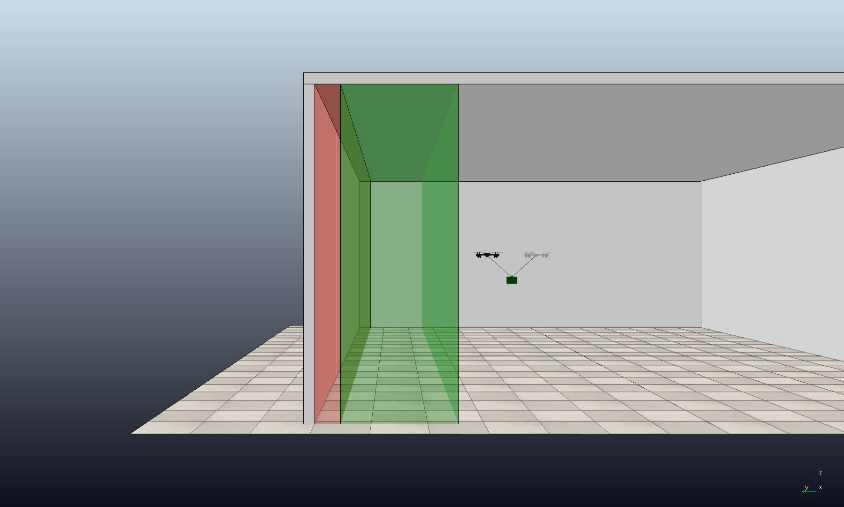
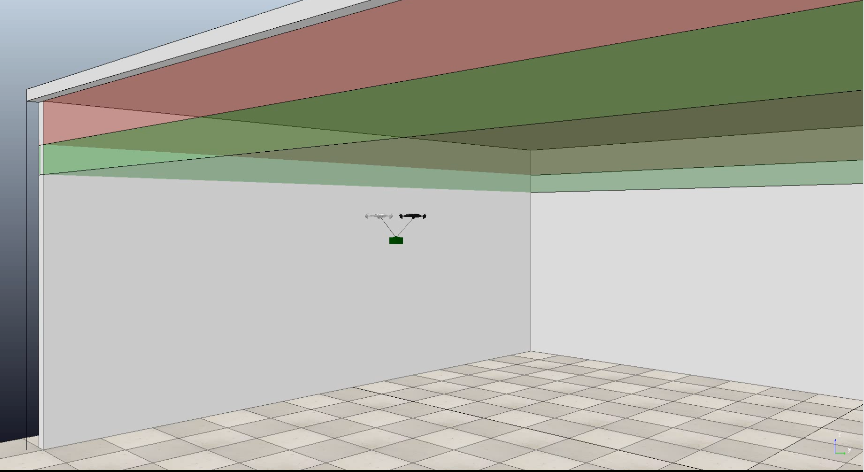
Obstacle Test
This test validates the obstacle distance performance metric. This test starts with the drones flying towards an obstacle either in the x, y, or z, directions. When the drones detect an obstacle 0.5m away from them, the obstacle detection system activates to stop the drones. The x, y, and z-direction test scenarios are shown below pictures. The drones must stop in the green region without entering the red. On the other hand, to exam the effect due to different payload, this test was also done with the full amount, half amount, and zero amount of payload.
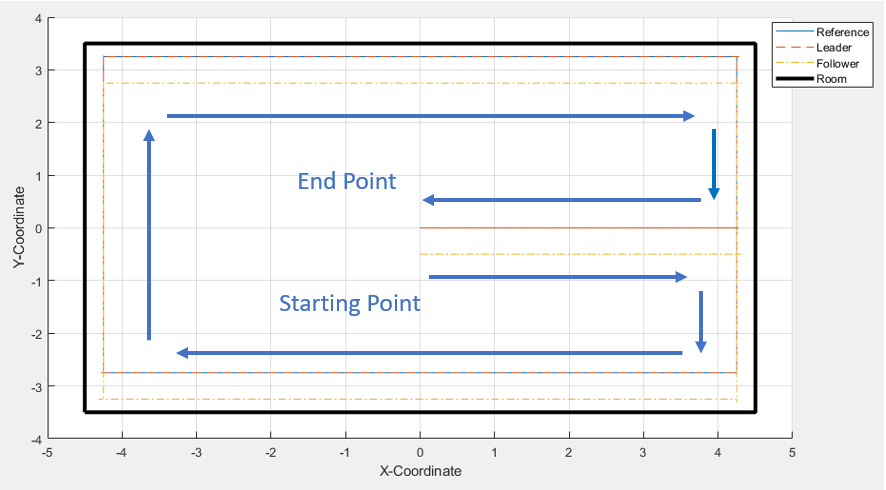
Drones Distance Test
This test validates the drone distance performance metric. The graph shown below is a top-down view of the z-shaped path the swarm took during the test. This test was also done with three different payload weights.

Partners and mentors
We would like to express our deep and sincere gratitude to our project sponsor, Dr. Jeff Pieper, for giving us the opportunity to carry out this capstone project under his supervision and providing invaluable guidance throughout the project. We also appreciate Dr. Pieper’s confidence and continuous support towards our project.
Our sincere thanks also go to the course instructor, Dr. Philp Egberts and Dr. Simon Li, and teaching assistant, Akposeiyifa Ebufegha for providing invaluable insights regarding the project’s progression.
Our photo gallery
To see picture in a large view, please right click and select “Open image in new tab”
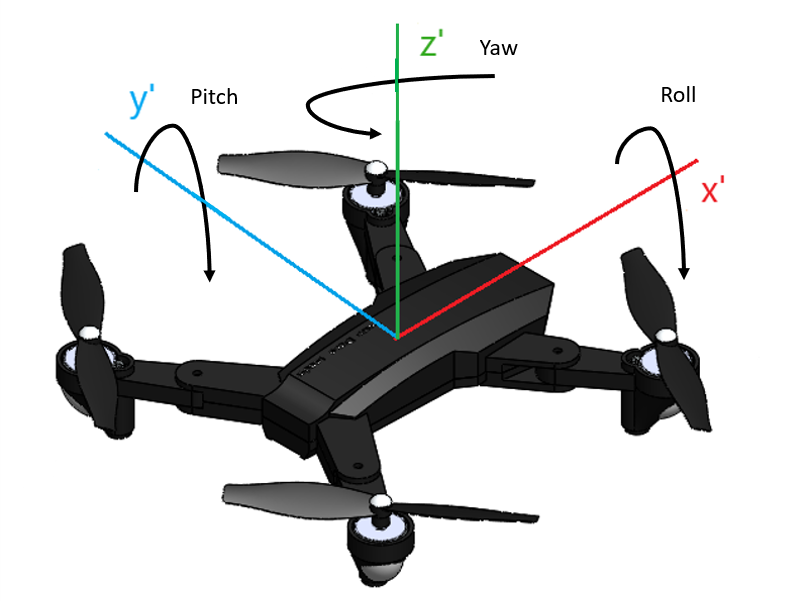
Drone Coordinate System Definition 
Drone Physical Properties


Leader Drone Position Control System 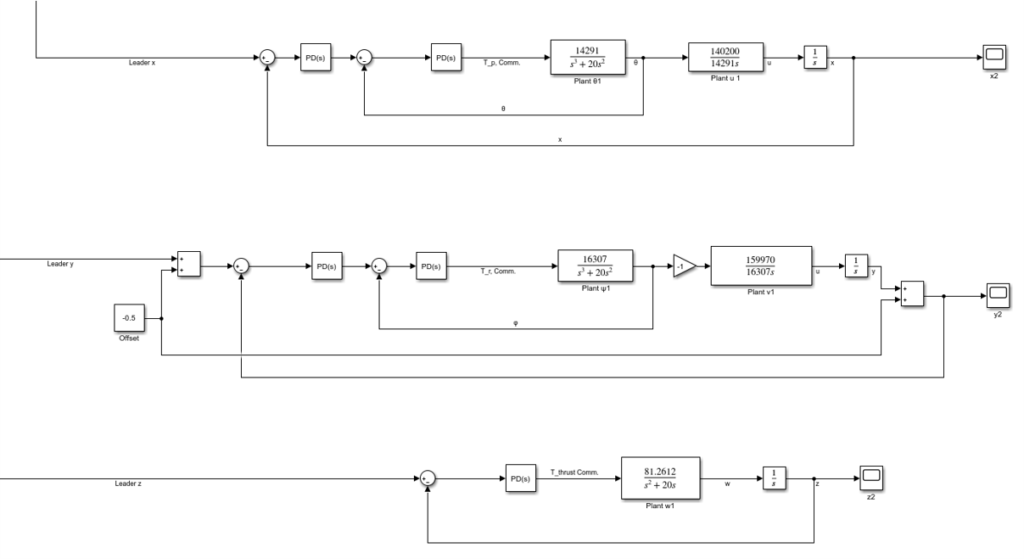
Follower Drone Position Control System 
Integrated Swarm Control System 
Obstacle Detection System for x-Direction 
Obstacle Detection System and Fail-Safe Mechanism
for y-Direction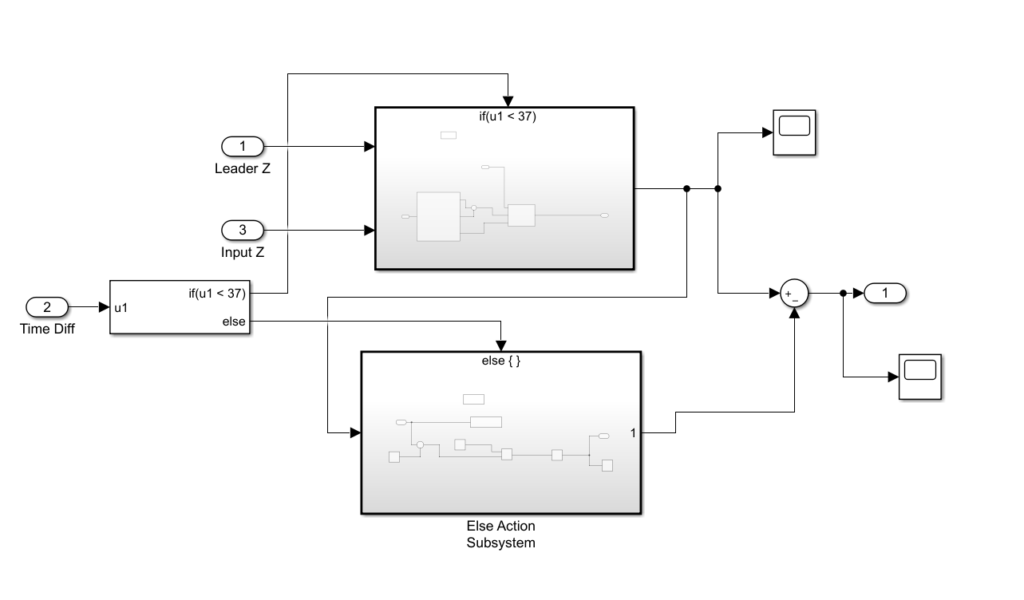
Obstacle Detection System and Fail-Safe Mechanism
for z-Direction
*In case the “Zoom Link” button doesn’t work, here is the link for the meeting: https://ucalgary.zoom.us/j/93293431815
*In case the “View Our Video” button doesn’t work, here is the link of our project video: https://www.youtube.com/watch?v=8C0DL4_ORMg
