Project Category: Mechanical
Join our presentation
Meeting ID: 986 5018 2582
About our project
Our design is a cost-effective body-powered transradial prosthesis, where the term ‘transradial’ refers to an individual that has experienced limb loss below the elbow. The cost effective aspect would allow the prosthesis to be widely accessible to low income individuals. Our design converts the rotational motion of the elbow into a translational force that drives the opening and closing of the hand. We equipped the prosthesis with a socket design that allows the user to easily mount and adjust the device to their comfort. To assist the user, the prosthesis has a locking device which allows the user to lock the hand onto an object, which gives some functionality of a human hand.
Our prosthesis is an easy to manufacture design that uses low-cost and effective materials. The prosthesis is made of interchangeable parts which allows the user to easily perform repairs and part replacements. The aim of the design is to make an accessible and durable prosthetic solution to those in need.
Meet our team members
Kendra Bissett

James Anderson

Jongsuk (Harry) Han

Justin Park

Details about our design
HOW OUR DESIGN ADDRESSES PRACTICAL ISSUES
One of the biggest issues with current transradial prosthetic solutions is their cost, which limits their accessibility. In addition to the price tag of the prosthesis itself, there are other associated costs such as prosthesis training, therapy, and maintenance. The goal of our design is to create a cost-effective body-powered transradial prosthesis which can be made widely available and requires little to no training, therapy, and maintenance costs.
Our transradial prosthesis design is an easy to manufacture model which uses low-cost and durable materials. An advantage of our design is that it is easily customizable and does not require a user specific manufacturing process. The design is made of interchangeable parts which allows the user to easily perform repairs and part replacements.
WHAT MAKES OUR DESIGN INNOVATIVE
Our design’s innovation stems from our use of mechanical components which make the prosthesis user-friendly and effective, while minimizing the cost. The design incorporates three main components: The hand gripping component, the hand locking component and the socket design.
Hand Gripping Component
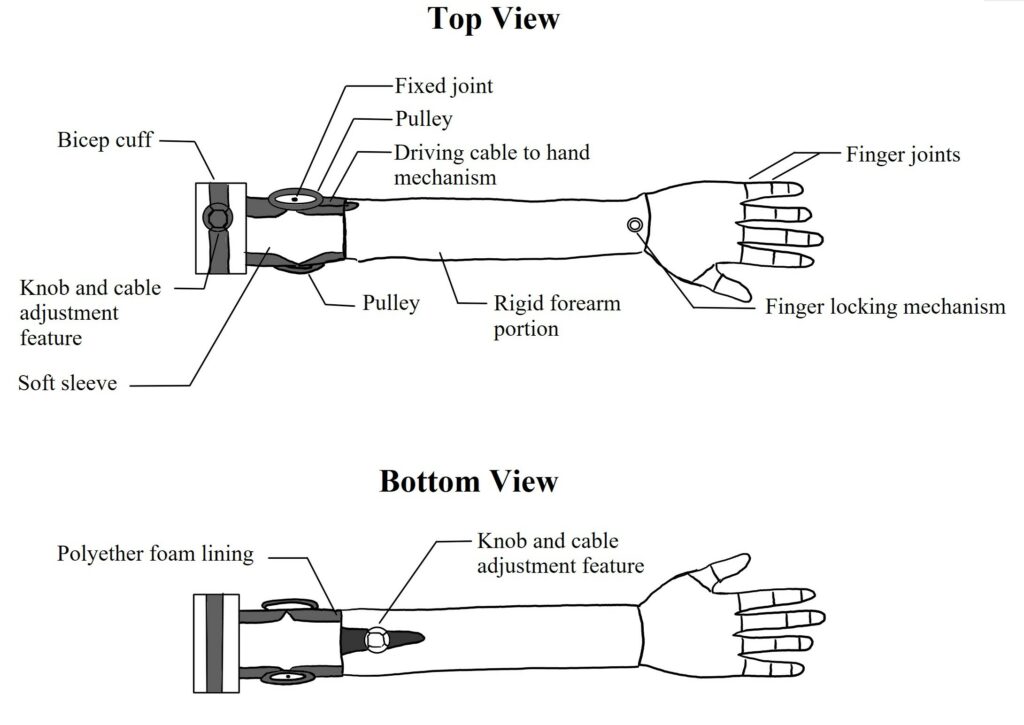
The hand gripping component consists of a system of spools and cables that convert the rotational motion of the elbow bending into a translational force that drives the opening and closing of the hand. As the user bends their arm, a spool located at the elbow turns with the arm which creates a tensile force on the cables and springs that run down from the elbow to each of the 5 finger joints. As the elbow bends, the tension in the cables forces the hand to close. This component gives the user control over the hand by simply bending and extending their elbow.
Hand Locking Component
The hand locking component plays a key role in the user-friendliness of the design. This component gives the user a level of control over the prosthesis as it allows the user to lock the hand onto an object. The hand locking component is toggled between the engaged and disengaged positions by simply clicking a button located at the back of the wrist. Once engaged, the hand will maintain its current position regardless of the movement of the elbow. This component gives the user the ability to lock the grip and hold an object while moving their arm freely.
Socket Design
The socket plays an important role in the overall comfort and effectiveness of our prosthesis. Our socket design allows the user to easily mount and adjust the prosthesis to their liking. Using a well thought-out design, the socket incorporates the use of a cable and knob tightening system with a layer of foam that allows the socket to conform to the shape of the user’s residual limb.
WHAT MAKES OUR DESIGN SOLUTION EFFECTIVE
Ability to Conform to Irregular Shapes
An important characteristic of our design is that the hand is able to conform to irregular shapes. This allows the user to securely grab and hold objects of different shapes. Our prosthesis has this ability due to the use of torsional springs located at each of the finger joints. This allows the “free” fingers to continue closing even if some of them have already contacted the object.
Ease of Use
The success of our design comes down to its usability and user-friendliness. It was found that if a prosthesis is not easy to use, the user will be less inclined to use it. With this in mind, we kept comfort and user-friendliness as top priorities. Each one of our design features play a critical role in ensuring this requirement was met.
HOW WE VALIDATED OUR DESIGN SOLUTION
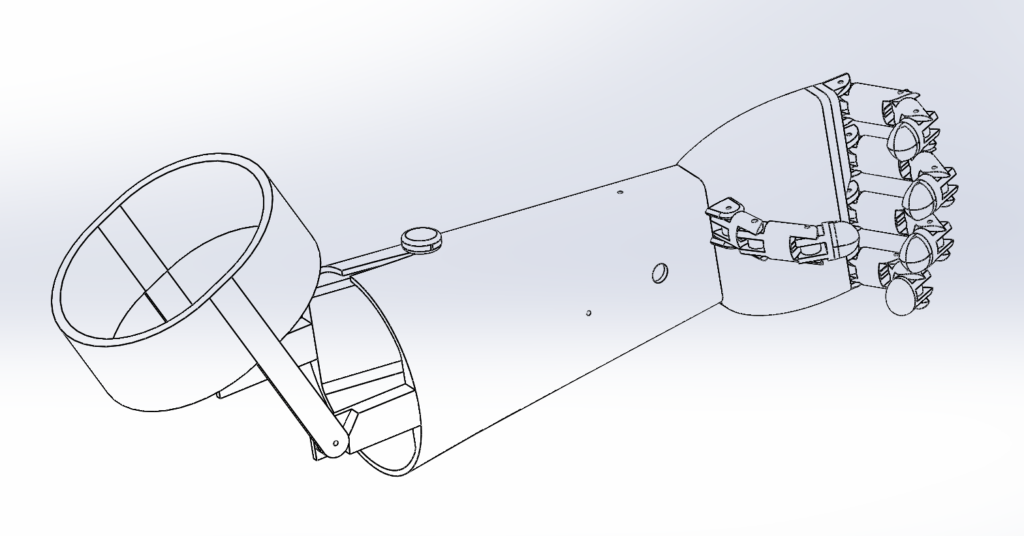
3D CAD Model
Our team created a 3D CAD model using SOLIDWORKS which included the various components that made up our design. This gave us a visual representation of our final design. In addition to the model itself, we completed various simulations and analyses which gave the team a verification of our end product.
Expert Insight
Our team was fortunate enough to have an expert in the field of prosthetic solutions who aided us throughout the duration of the project. This expert provided us with insight that helped with the progression of the final design. Due to the expert’s extensive experience working with prosthetic solutions, he was able to provide us with a form of design verification.
FEASIBILITY OF OUR DESIGN SOLUTION
Cost
Since cost was a major priority for our design, our goal was to be able to keep our materials cost below $100USD. This was done through extensive research into finding materials that would be suitable for our design. We are aware that there are other costs associated with the manufacturing, licensing, and distribution of the prosthesis, but our scope was focused solely on the cost of materials.
3D Printing Prototypes
Due to the current pandemic, our team was unable to create a physical prototype of our design. If the opportunity allowed, we would love to attempt to create a real life prototype of our prosthesis.
Partners and mentors
We would like to thank Dr. Simon Li and Min-Hyung Lee from the University of Calgary for their help over the course of the project. They provided the team with great advice and feedback on our project.
We would also like thank Michael Dawson from the University of Alberta, who currently works as the lead research engineer at the Glenrose Rehabilitation Hospital in Edmonton. Over the course of the project, Mr. Dawson provided us with expert insight into the field of prosthetic solutions. He helped give us direction on how to improve our design.
Our photo gallery