Project Category: Mechanical
Join our presentation
About our project
Our project sponsor has been developing a theoretical dynamic model of a unicycle for the past 3 years. Their model develops equations for the four governing torques that can be applied to balance a unicycle.
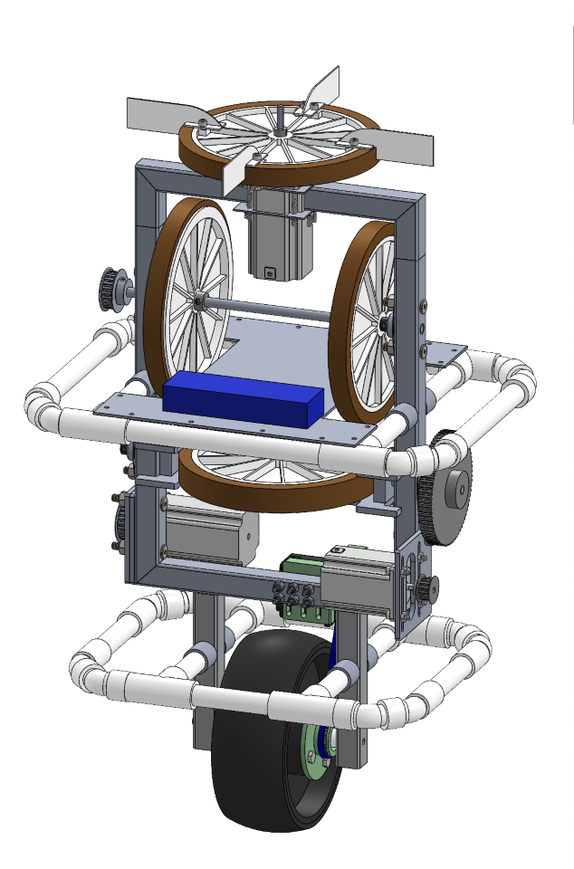
Our capstone team has been tasked with designing a SOLIDWORKS model of a unicycle that can apply these four torques and has also been tasked to create a control system so the unicycle can stay balanced without human input. The first portion of the project was completed in our first semester. This design included:
- An aluminum frame
- A control moment gyroscope to replicate the side-to-side tilting of a unicycle rider.
- A yaw fly wheel to replicate the twisting of a unicycle rider
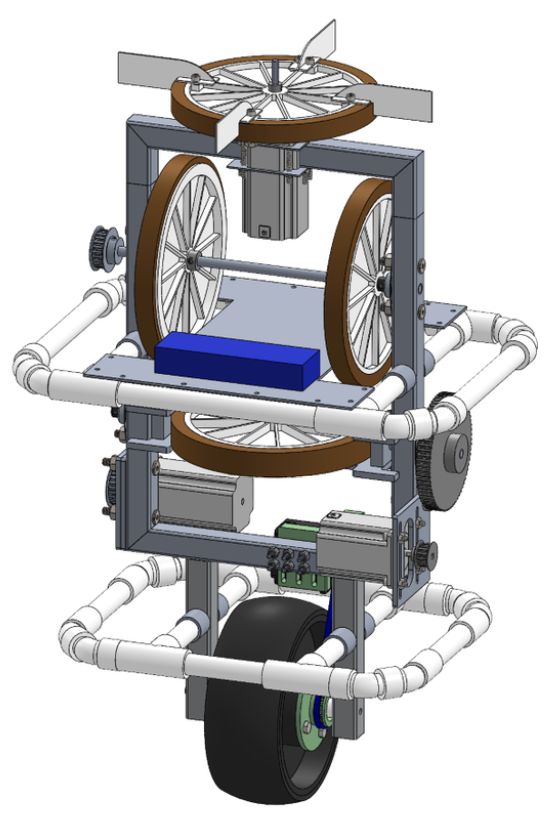
- A pitch fly wheel to replicate the forward and backward tilt of a unicycle rider
- A fork and wheel to control the forwards and backwards motion of the unicycle
The second portion of the project was to develop a control system to control the torque actuation based on the position of the unicycle and the given remote-control commands. Accelerometer and gyroscope sensors would be positioned on the unicycle model to communicate with the control system and provide input to the unicycle’s motors.
Meet our team members





Details about our design
HOW OUR DESIGN ADDRESSES PRACTICAL ISSUES
We have discussed using the model as a product deliverer. It is more compact than a 4-wheel toy/vehicle, as it only has 1 wheel. This will allow the model to get through tighter spaces and will give it access to more difficult and challenging terrains. However, it is more energy intensive than a 4-wheeler because of the actuators, and inherently less stable. Although a 4-wheeler is bulkier in size, it is more energy efficient as it does not require energy to balance itself. Therefore, the main purpose of the design is for research and development at this point.
WHAT MAKES OUR DESIGN INNOVATIVE
During the research stage of our project, we looked at many different research papers and prototypes of robotic unicycles. We wanted our design to be original and chose to use flywheels with a central control moment gyroscope. We believe that this will provide more stability and will be more compact than existing models. Although our design is unique, we have conducted extensive research to ensure that it will work.
WHAT MAKES OUR DESIGN SOLUTION EFFECTIVE
Our Design solution is effective because it replicates all movements and torques a unicycle rider would make to stay balanced. The design has four actuators to control the four governing torques required to stabilize a unicycle.
HOW WE VALIDATED OUR DESIGN SOLUTION
- We used SOLIDWORKS Finite Element Analysis on design components to ensure parts would not fail
- Performed extensive control system testing in MATLAB that was used to determine parameters for our control system. This MATLAB simulation shows that our unicycle is able to self-balance, even when pushed in various directions.
- We built a prototype of the gyroscope component to observe how it will behave in the real world.
FEASIBILITY OF OUR DESIGN SOLUTION
Through-out the design phase of this project, we made cost one of our main priorities. The majority of the compromises we made were for cost reduction. We worked closely with our sponsor to ensure the design was within his budget. Since we are only making one unicycle specifically for our sponsor, our design can be considered very feasible.
Partners and mentors
The team would like to recognize several individuals for all the help and support they have provided throughout the course of the project. Without them, the project’s success would not have been possible.
We would like to thank Dr. Roes (Arief) Budiman for sponsoring our project and providing guidance and practical knowledge whenever we are in need. We would also like to thank the other members of Dr. Budiman’s team, Carolyn Pethrick and Yunfeng He, for their unending patience in helping us verify model calculations. In addition, our professor Dr. Egberts, and our teaching assistant Joseph Ebufegha, have been great assets in providing advice on how to develop the project, fulfill the deliverables, and manage the project flow efficiently.
This project would not have been successful without the sacrifice of our teammates and the cooperation of the individuals mentioned above.
Our photo gallery
Unicycle Design Isometric View 
Pitch flywheels 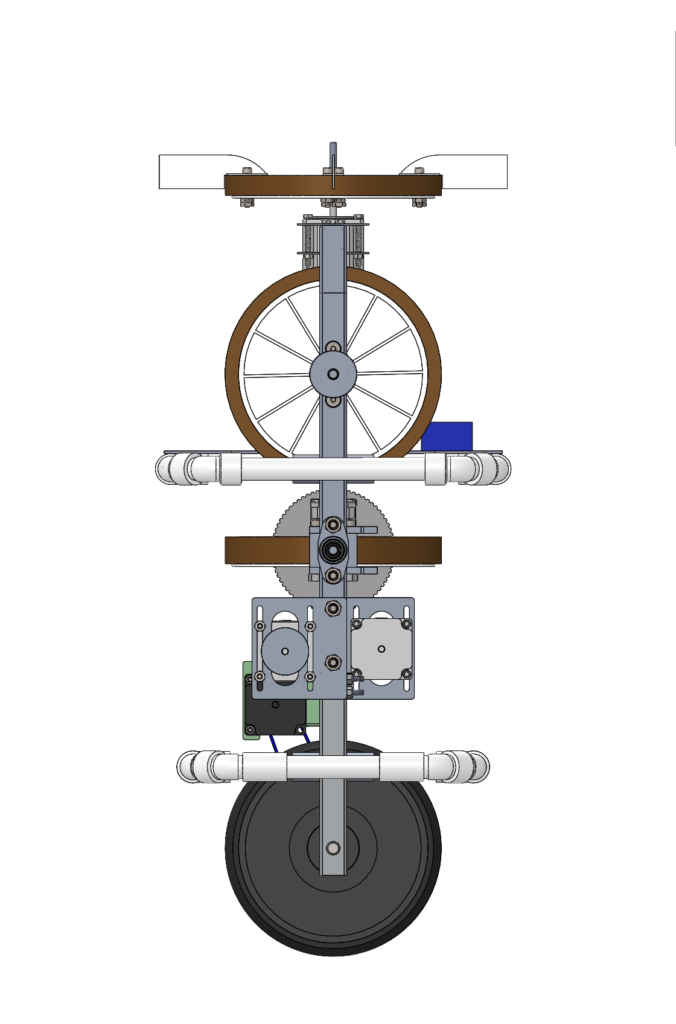
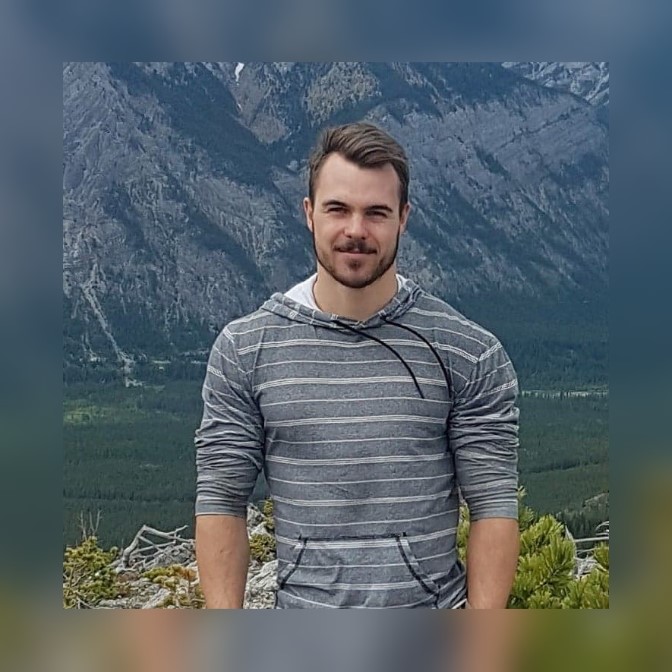
Side view 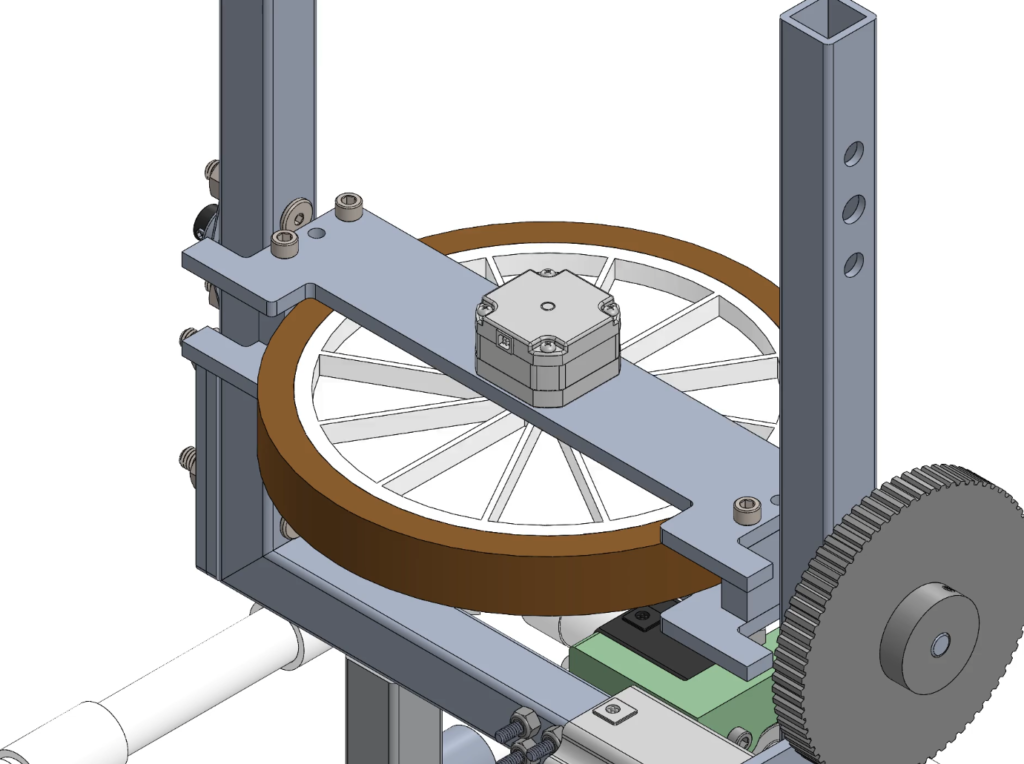
Gyroscope 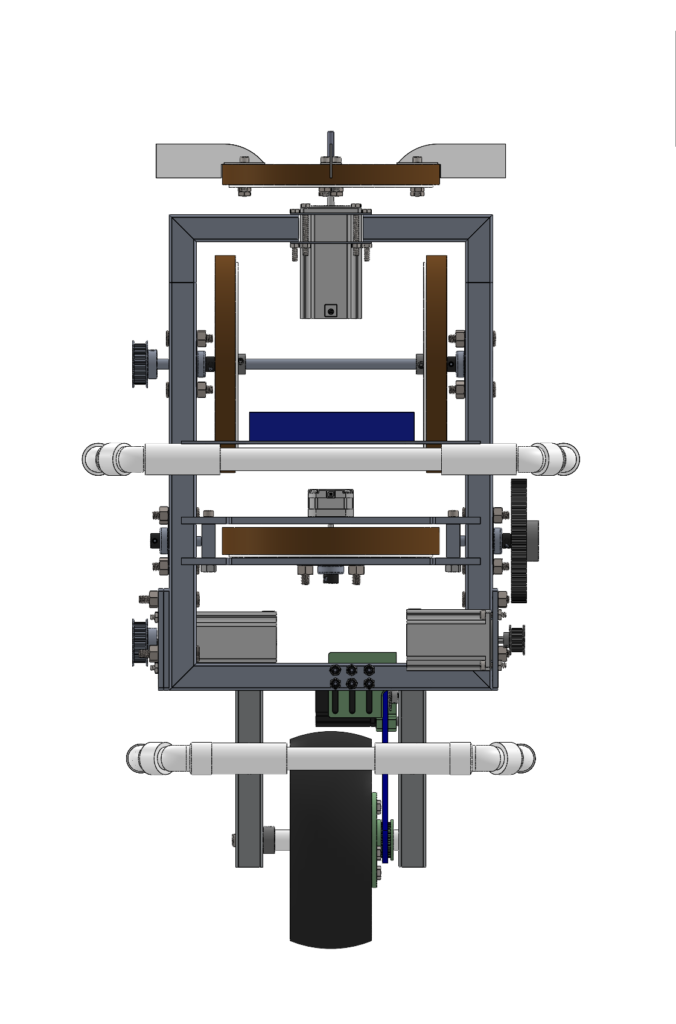
Front view 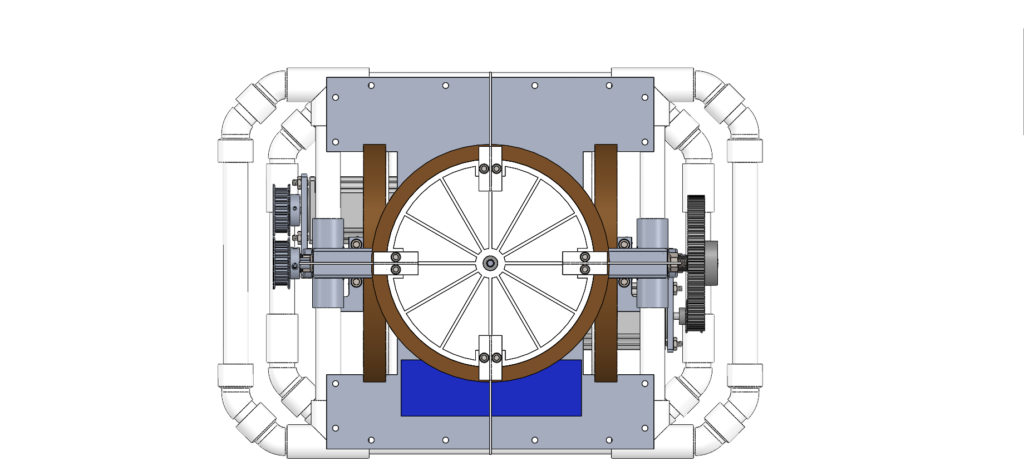
Top view 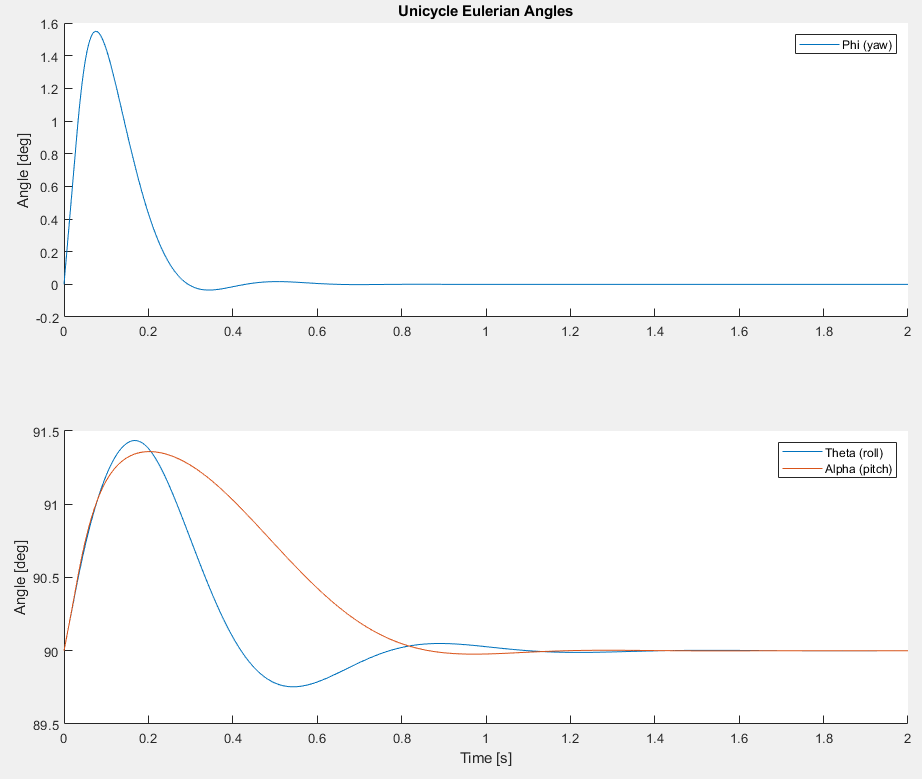
Unicycle angle response from initial conditions 30deg/s in yaw and 15deg/s in pitch and roll (with 10ms feedback delay) 
Unicycle control torque response from initial conditions 30deg/s in yaw and 15deg/s in pitch and roll. 
Testing control system code with an accelerometer and a small stepper motor using Arduino
