Project Category: Mechanical
About
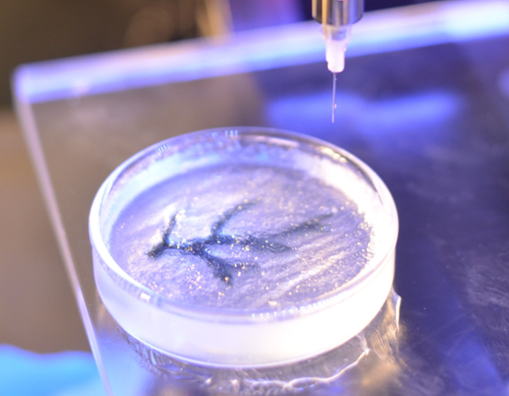
3D bioprinting is an emerging technology with the potential to eliminate organ transplant waiting lists. The Advanced Biofabrication Lab (ABL) at the University of Calgary aims to use a 5-axis robotic arm in conjunction with a syringe pump extruder to generate 3D biocompatible structures through the Freeform Reversible Embedding of Suspended Hydrogels (FRESH) method. However, programmable syringe pump extruders that are capable of extruding highly viscous materials come at a high price point. Due to many projects within the ABL requiring a syringe pump extruder, there is a need at the ABL for the development of an affordable syringe pump extruder that is programmable, capable of extruding highly viscous biomaterials, and capable of retracting the syringe to halt the fluid flow.
A previous student team at the ABL developed a prototype for such a device. However, this design had many limitations, including limited syringe size compatibility, inability to consistently extrude and retract, and highly inaccurate flow rates. The goal of this capstone project was therefore to optimize this existing design and add software development for control within a budget of $300.
Meet Our Team
Simon and Vincent made up the design team. Together, they were responsible for all aspects of the physical syringe pump extruder design. Simon focused on designing the entire leadscrew assembly and gearbox which features an epicyclic and simple gear train in parallel. Vincent’s work was concentrated on redesigning the syringe mounting system. He developed a syringe barrel holder featuring a clamping mechanism that enables a rapid syringe-swapping process and a pusher that allows for both extrusion and retraction.
Amanda and Quang made up the controls team. They explored both open-loop and closed-loop approaches to controlling the extrusion flowrate of highly-viscous non-newtonian fluids. Quang derived the dynamic equations that model the system’s behaviour from motor input through to flowrate output, while Amanda worked on integrating the program with the 5-axis robotic arm. Together, they were able to successfully control the extrusion during robotic 3D bioprinting which allowed us to achieve accurate prints with high fidelity.
Jonah served as the team’s project manager. He was responsible for maintaining the project schedule and coordinating communications with all project stakeholders, both internal and external. He also led the design and manufacturing of the syringe pump enclosure, and he performed the FEA simulations for gear fatigue life and pusher deflection.
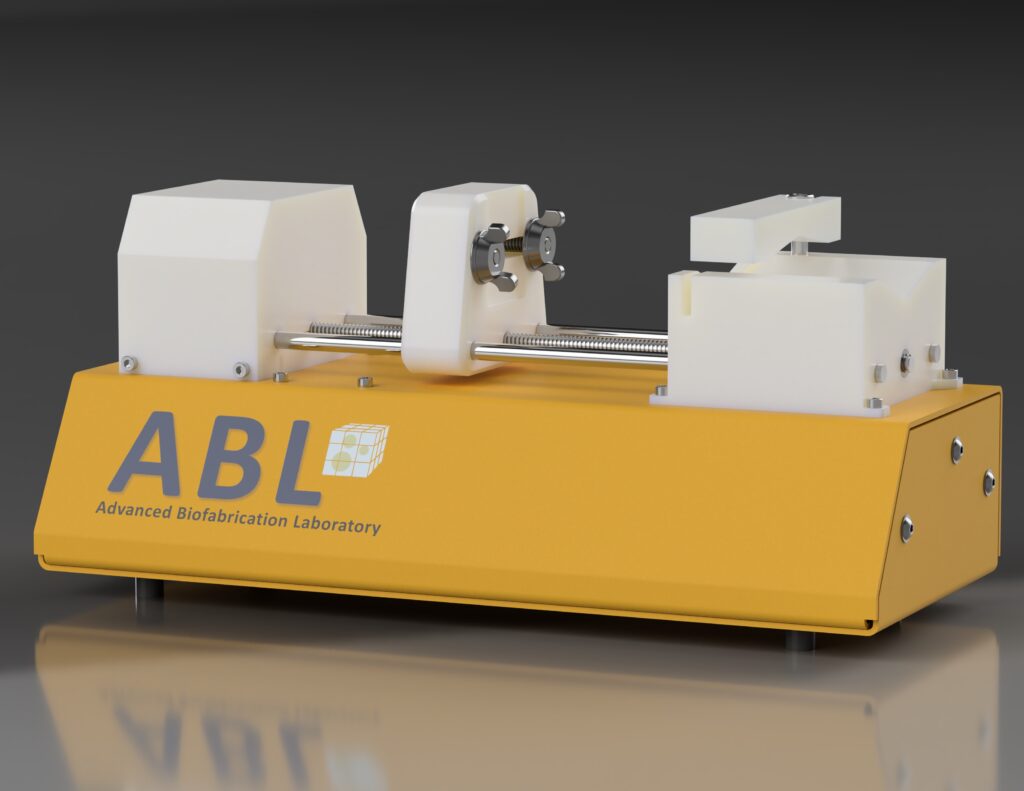
Design Features
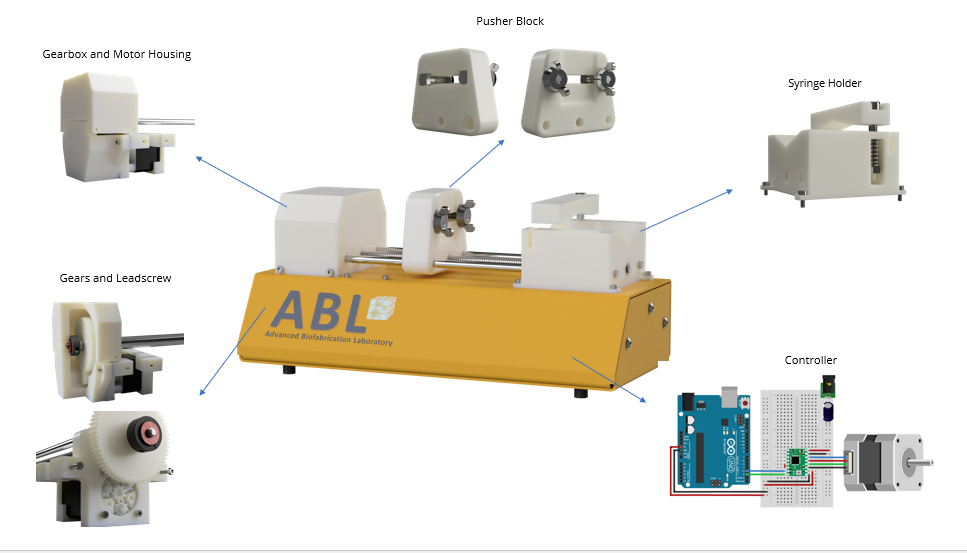
Syringe Holder:
The syringe holder is where a syringe containing bioink material is mounted. Securing the syringe to the device is a spring assembly system that clamps down to prevent upward deflection of the syringe during operation. Additional features of the syringe holder include a V-sloped groove to provide containment of varying syringe diameters and an additional slot for the syringe flanges to hold the syringe in place during retraction.
Pusher Block:
A syringe plunger can be secured to the pusher block which is driven by the motor along a leadscrew. As the lead screw rotates, the pusher block moves the plunger and extrudes material from the syringe. The securement of the plunger is accomplished using wingnuts to clamp against the block allowing for retraction as well as extrusion.
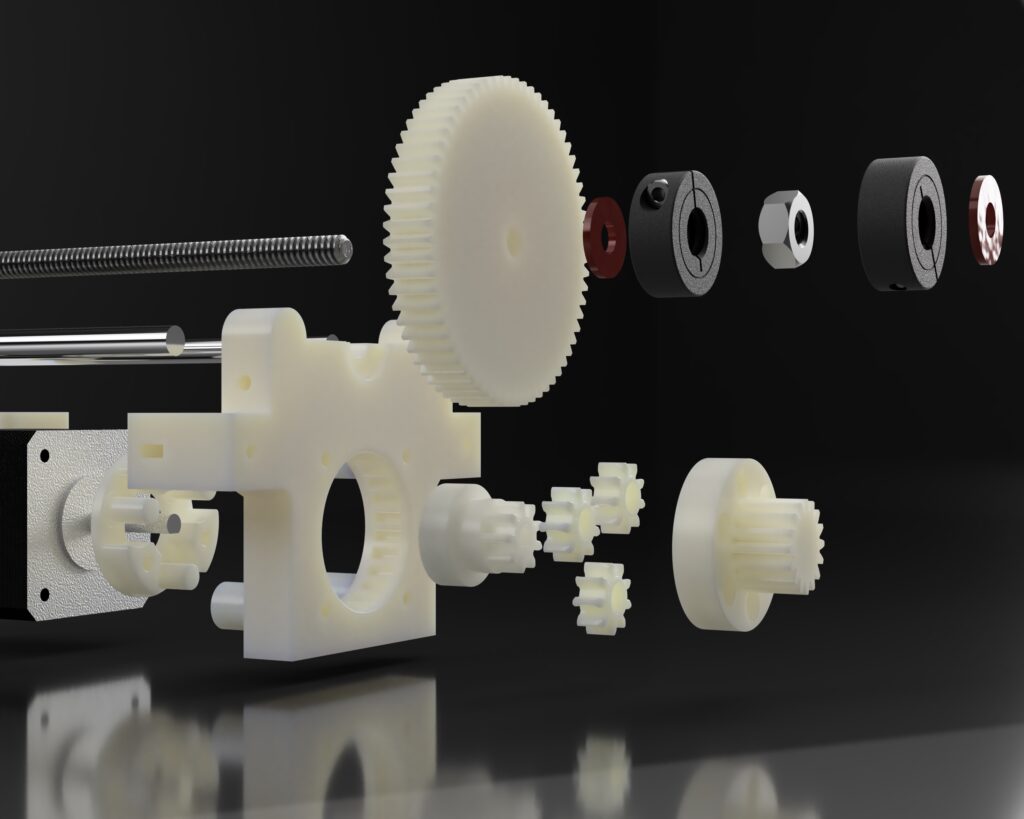
Gears and Leadscrew:
The gear system is composed of a planetary gear system forming 4:1 gear ratio in a compact form. This is then meshed with another set of spur gears to obtain another 4:1 ratio, the output of which is tightly fitted to the leadscrew assembly. Overall the system attains a 16:1 gear ratio, allowing a NEMA 17 motor to extrude highly viscous materials.
Motor Housing and Gearbox:
The motor securely fastens the motor in the assembly and also has a fully integrated stationary ring gear allowing a flawless mesh between the gear system and the syringe pump. The leadscrew system is aligned in the assembly through the tightly fitted gearbox system, ensuring smooth transmission from stepper motor output leadscrew.
Control System:
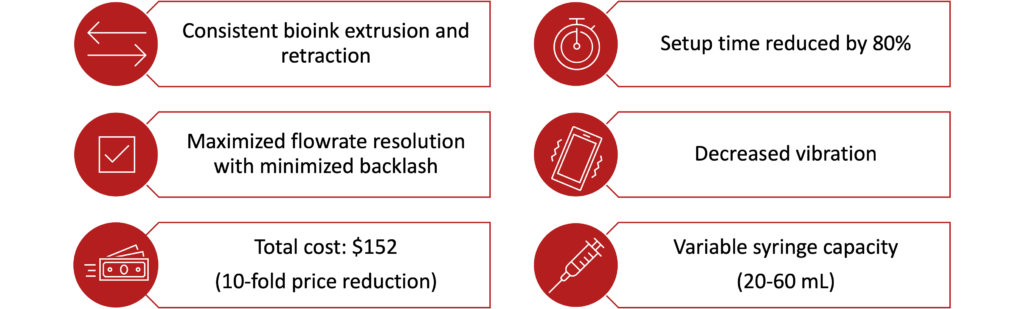
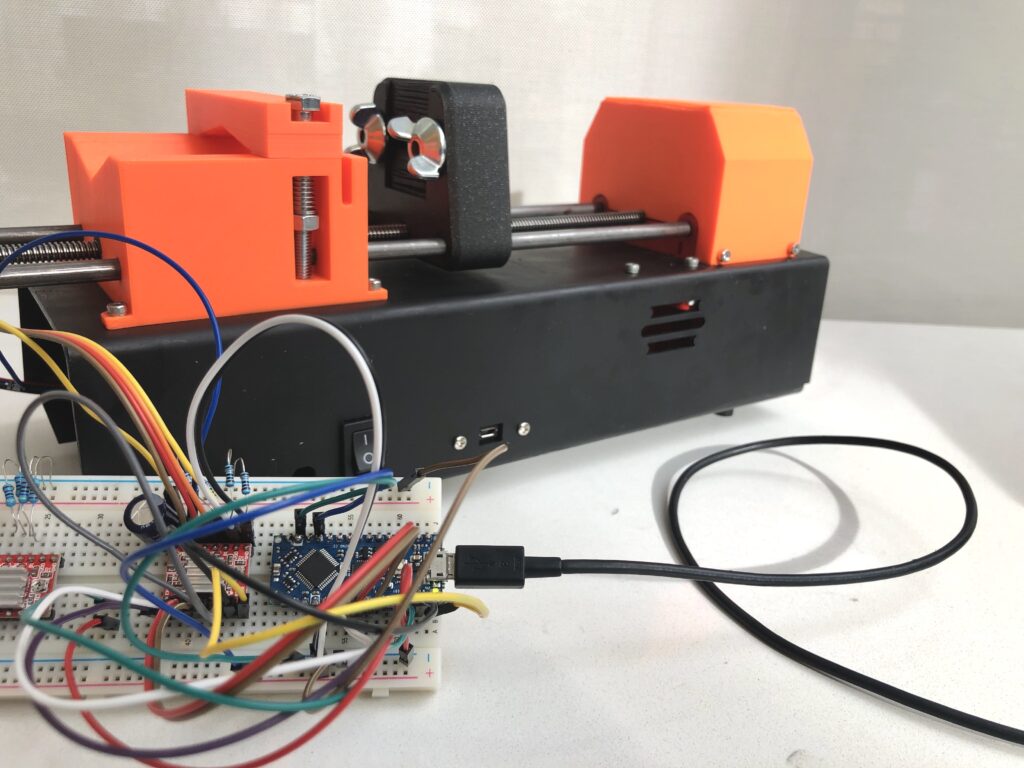
The flowrate control for this pump uses an open-loop control system that calculates the stepper motor inputs to achieve the desired output angular velocity. This control system was successful in delivering flowrates below 10% error. This syringe pump can be operated as a standalone device or connected to other devices like a 3D printer or a robotic arm through serial data inputs. The pump is also equipped with an emergency stop switch, as well as a limit switch to halt operation when the maximum extrusion length is reached.
HOW OUR DESIGN ADDRESSES PRACTICAL ISSUES
Our design aims to increase accessibility to bioprinting technology. Current syringe pump extruders available on the market that are programmable, capable of extruding highly viscous materials, and can fit a range of syringe sizes cost upwards of $1000, making it infeasible for laboratories to own multiple units.
WHAT MAKES OUR DESIGN INNOVATIVE
Our design combines many desired features of commercial syringe pumps such as programmability and compatibility across syringe sizes and various bioinks into a cost-effective and affordable package. At the same time, the platform of our device is highly customizable and can be tuned for specific uses. Namely, we have been successful in running our syringe pump with a 5-axis robot arm along the same user interface.
An important distinction of our design is the automated retraction feature that many commercial options lack. Upon completion of a print or at any point that extrusion is paused throughout the print, our pusher is able to retract the plunger in the syringe to relieve back pressure and prevent material leakage. This functionality allows for structures to be printed with higher precision as there will not be any extra material at the end of the print.
The greatest point of innovation in our design is from the use of 3D printing technology. 3D printing-based manufacturing has allowed us to provide many important features commonly exclusive to higher-end models at a fraction of the cost.
WHAT MAKES OUR DESIGN SOLUTION EFFECTIVE
Our design solution featured a 16:1 gear ratio which ensures that there is sufficient torque for the pump to operate through a wide range of viscous materials. This is also accounted for in our controller such that flow rate can remain consistent.
A longer spring clamp with a larger groove in our syringe holder allows the device to fit syringes from 20 mL to 50 mL. The pusher block features an adjustable clamp to accommodate a matching plunger size as well.
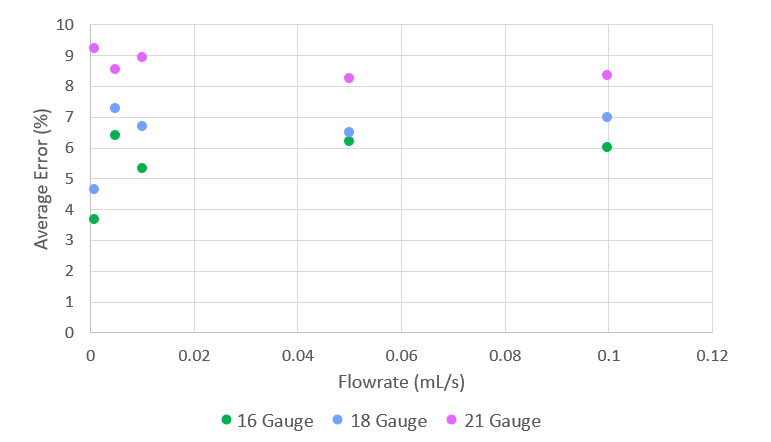
HOW WE VALIDATED OUR DESIGN SOLUTION
Our pump design was validated by comparing its performance with commercially available syringe pump extruders. Specifically, we performed extensive testing and verification of our flowrate based on input and output of our overall system. In general, we found less than 10% error across flowrate range of 0.001 – 0.01 mL/s and needle size range of 16 – 21 gauge (0.83 – 1.63 mm OD). These flowrate accuracy tests were then compared to similar testing done on commercial models and we found that our model was indeed competitive.
Feedback from the project stakeholders also served to validate our design as it progressed.
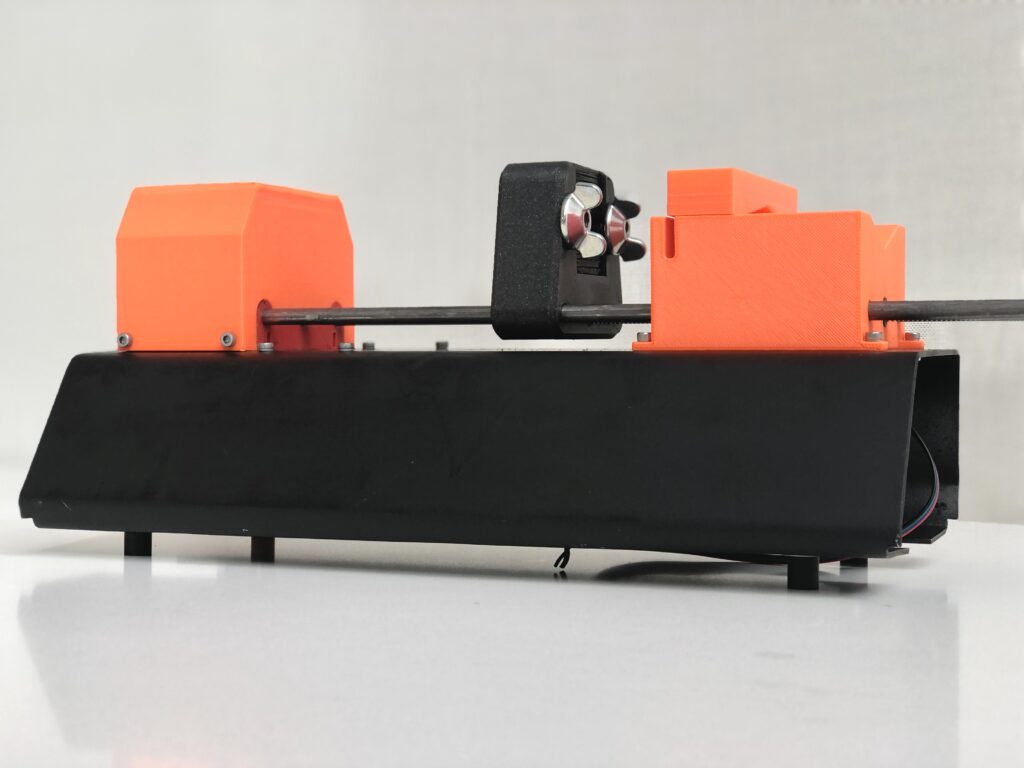
FEASIBILITY OF OUR DESIGN SOLUTION
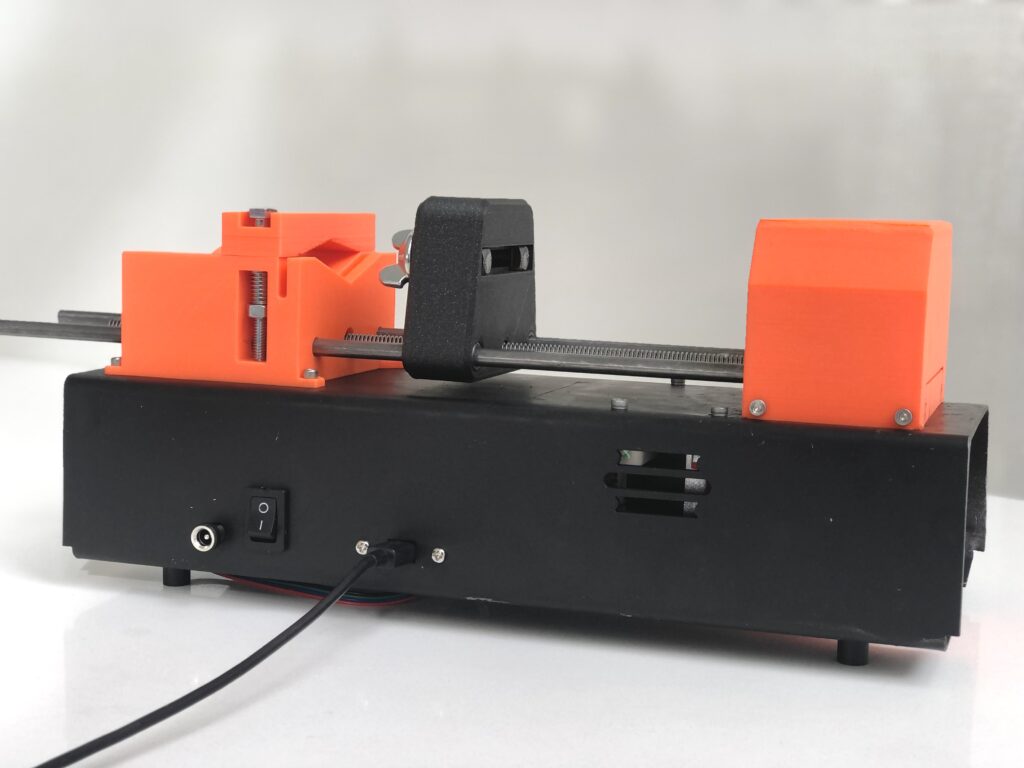
The feasibility of our design was proven through its manufacturing. Testing of our design showed that we were within performance parameters and that desired functions were achievable at massively reduced costs through the use of 3D printing. Our design is readily assembled using 3D printed parts and required a total printing time of 40 hours. As seen below, we were able to produce a fully functional model of our design.
Acknowledgments
We would like to thank the Schulich School of Engineering for the opportunity to demonstrate the engineering knowledge and skills that we have developed over the course of our mechanical engineering education.
We would also like to extend our sincere gratitude to our project sponsors, Dr. Keekyoung Kim and Dr. Jihyun Lee from the Advanced Biofabrication Lab (ABL) and the Intelligent Automation Research (iAR) Laboratory, for sharing their expertise and resources in support of our capstone team. We appreciate the guidance provided by Joonhwan Shin as we progress through the project and acknowledge the contributions of ABL alumni, Atharv Ambhorkar and Ethan Le, to the initial stages of the development of this syringe pump extruder.
Photo Gallery
References
[1] “Bioprinting,” Advanced BioMatrix. [Online]. Available: https://advancedbiomatrix.com/bioprinting/. [Accessed: 02-Apr-2022].
