The Manta Ray Robot is an unmanned underwater vehicle (UUV) that mimics the swimming mechanics of a manta ray. The primary swimming mechanism involves a tensegrity structure in the wings that utilizes both rigid and elastic components to actuate the wing motion.

Learn about the Manta Ray Robot from our team: https://vimeo.com/695214122
The Tensegrity Structure
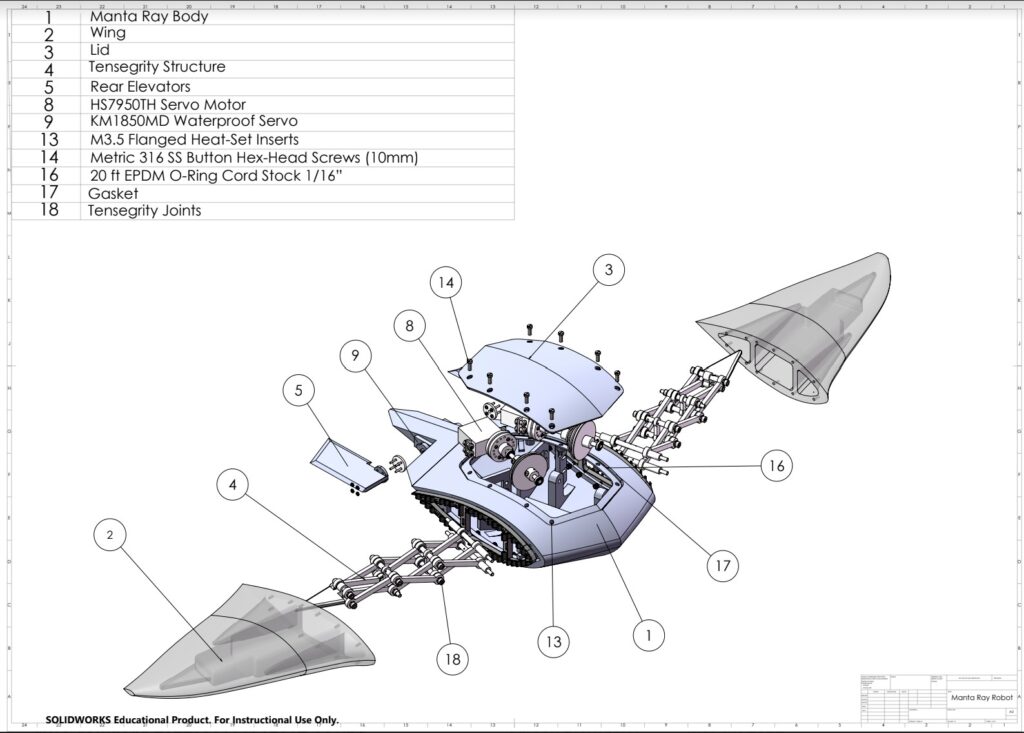
The tensegrity structure in the wings (labelled #4 in the exploded view on the right) is actuated by a motor that tensions cables passing through the rigid beams in the wings. As the cables are tightened by the rotation of a cam, the wing is lowered or raised depending on the rotation direction, and as tension is released, the wing returns to it’s neutral position.
Simulation Data
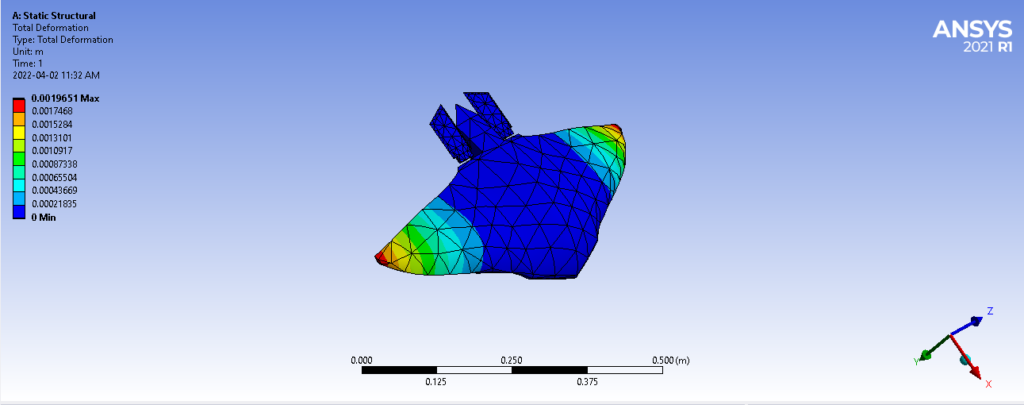
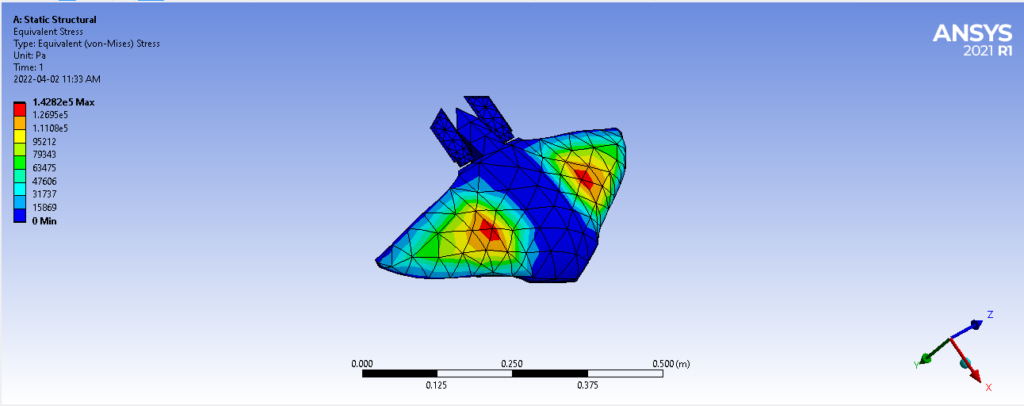
Our simulations lend a glimpse into the behavior of the Manta Ray Robot under water.
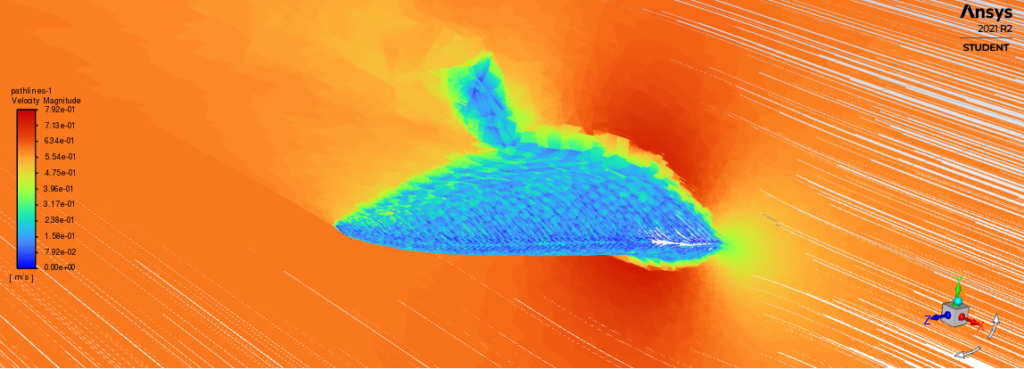
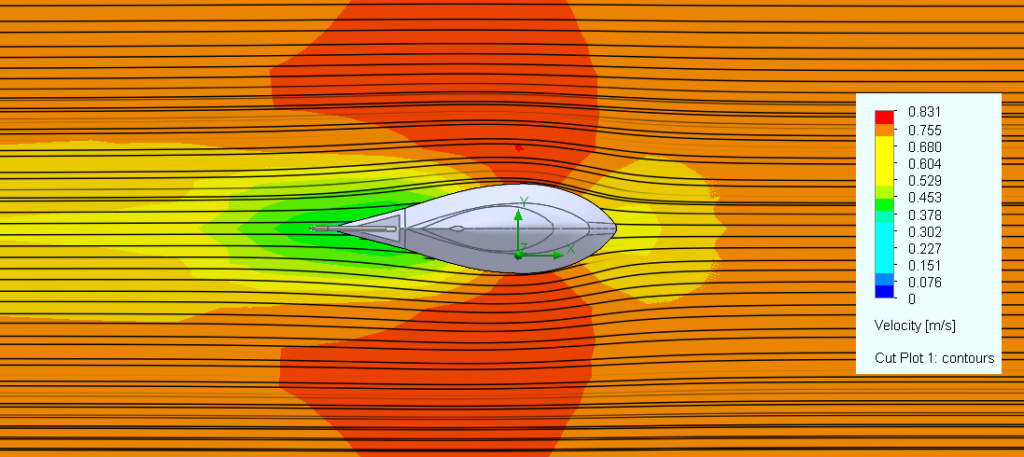
Flow simulations give an idea of how the water will flow around the body, while stress simulations show forces acting on the body from the surrounding flow. This can help determine high stress areas and possible weak points on the body.
About Us
Our group consists of 6 mechanical engineering students studying at The University of Calgary working in tandem with 6 engineering students from Tianjin University in China. While the U of C team focused on concept development, design and simulations, the TJU team aided in CAD design and played a major role in manufacturing and assembly of the robot, as well as shipping the model to Calgary. With different backgrounds and aspirations, we came together to work on the common goal of developing a Manta Ray Robot over the course of the 8 month school year.
The Tianjin University Team






The University of Calgary Team






