Project Category: Multidisciplinary

About Our Student-Sponsored Project
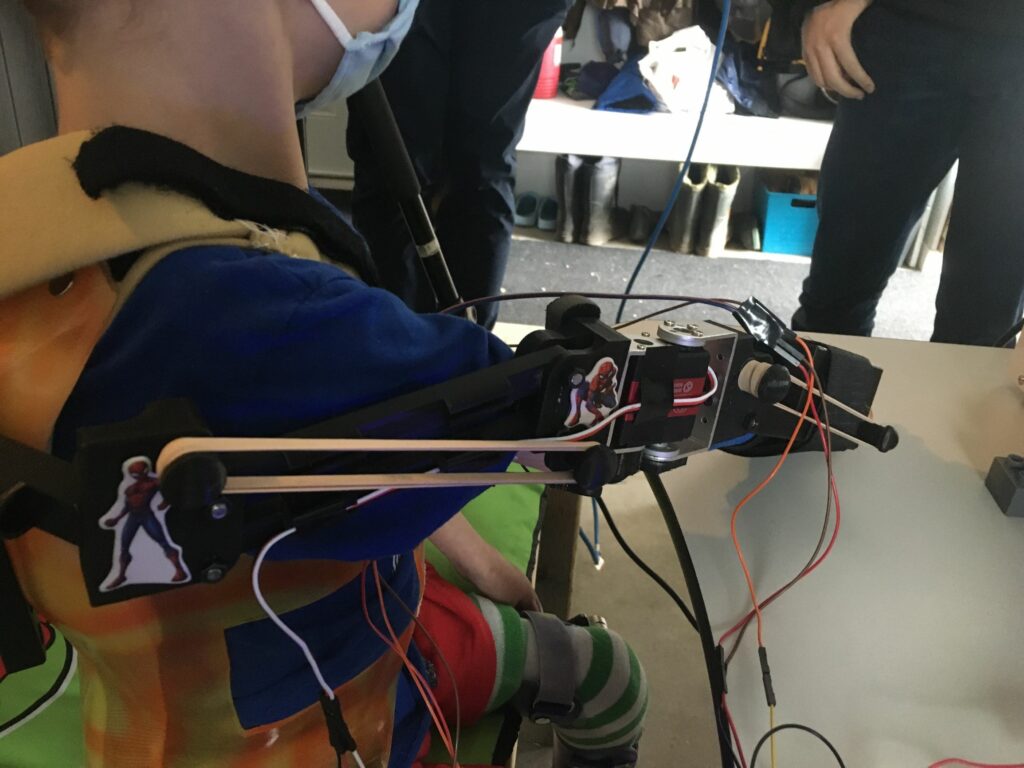
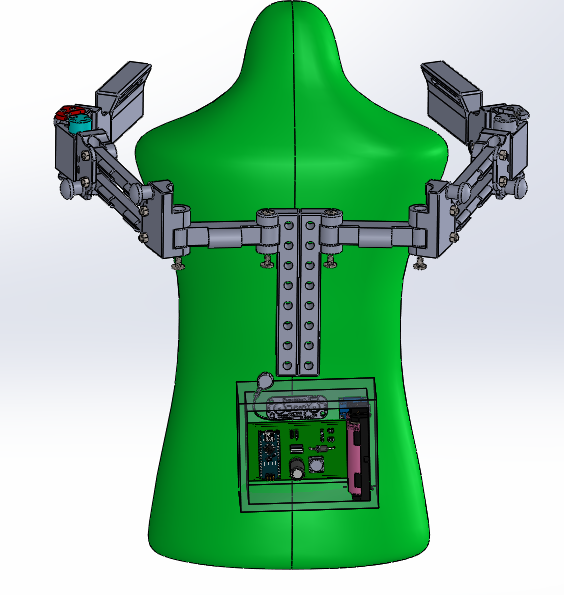
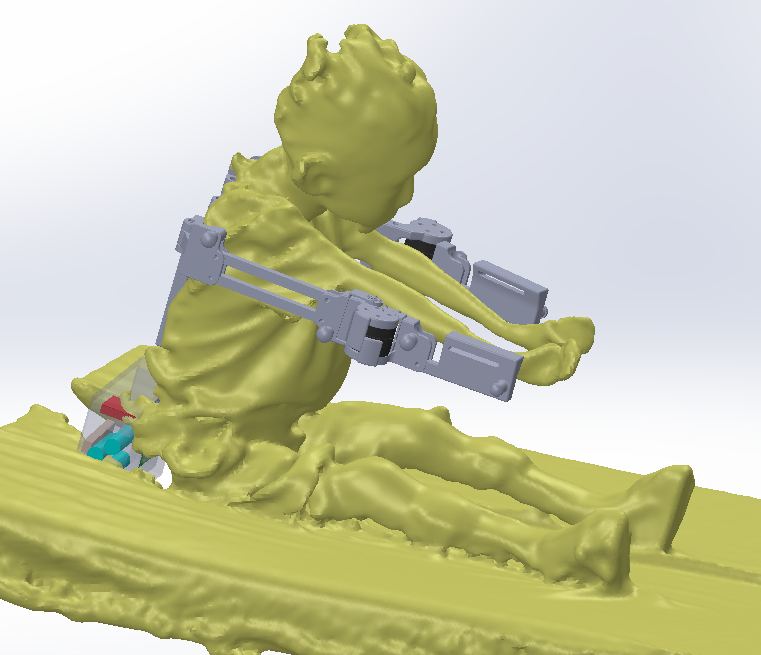
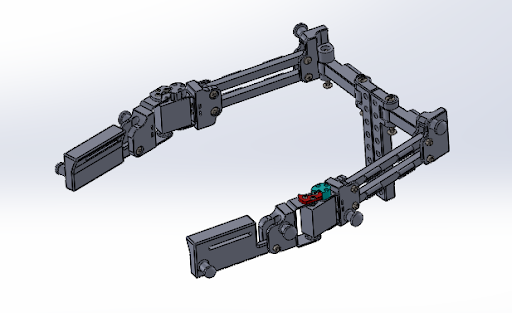
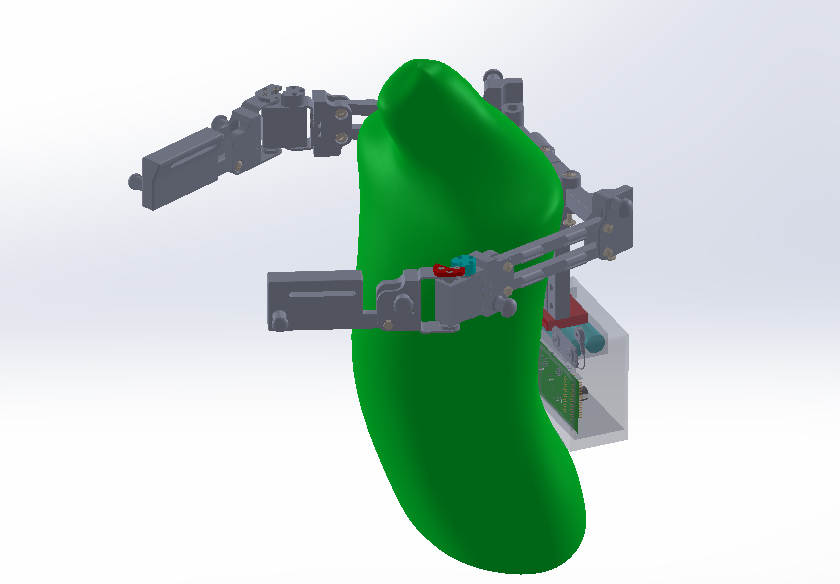
Our group proposes an assistive living orthosis to introduce a level of independence for children with arthrogryposis to assist with feeding, drawing, and playing with toys. Our design includes an affordable, 3D-printed exoskeleton that utilizes two mechanisms to provide support and functionality to the patient. The first is an isoelastic system using a variable number of elastic bands to provide vertical lift and eliminate the weight of the patient’s arms. The second incorporates actuated servo motors at the elbow joints to provide the user with different positions of elbow flexion and extension. The intentionality of the patient’s movement is determined via myoelectric sensors that read muscular activity and actuate the elbow to provide useful motion. As well, the device is anchored to the patient via a body brace that closely adheres to the patient’s torso in order to allow for useful trunk rotation necessary for effective vertical and lateral movement.
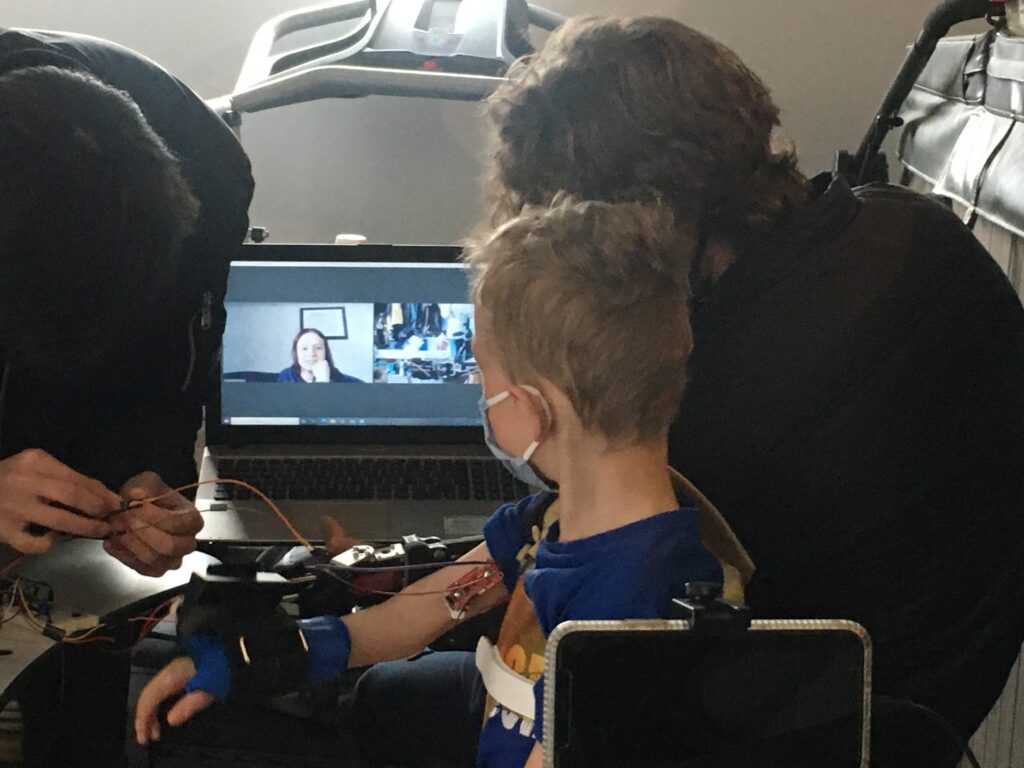
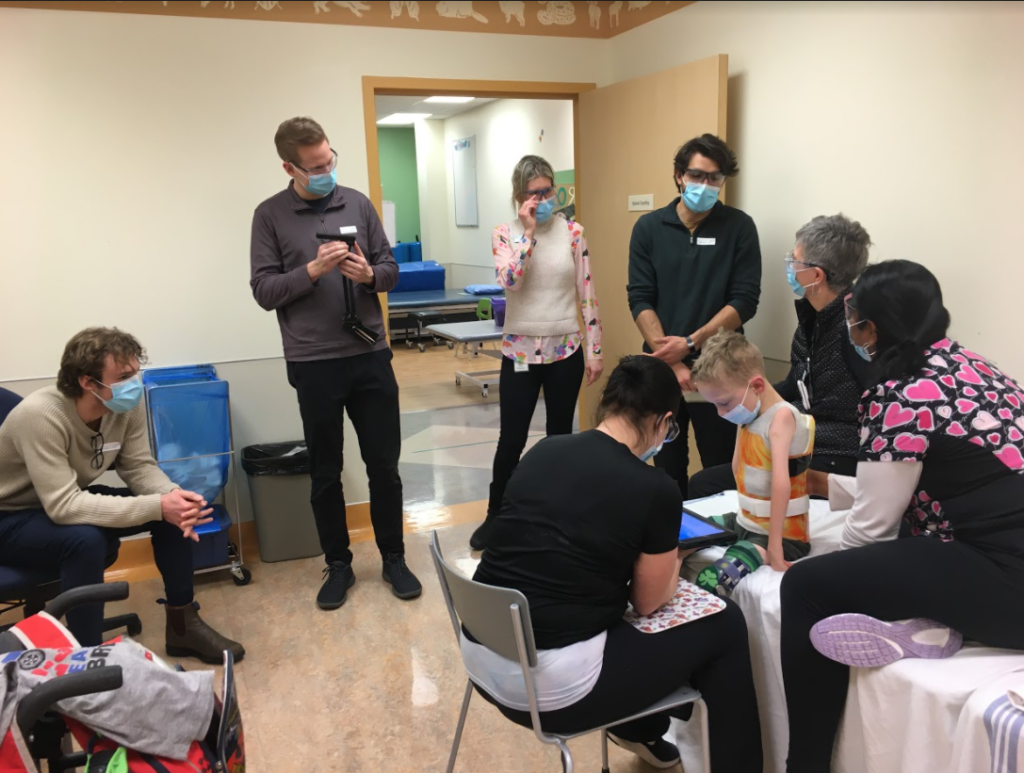
We have been fortunate to partner with a family through the Alberta Children’s Hospital (ACH) to test our device. Reid Hintz is a seven-year-old boy with arthrogryposis, who was born with many joint contractures and consequently severely underdeveloped muscles. Growing up, Reid has performed most of his activities lying down, such as eating, playing, and writing. He has undergone many surgeries to help with his joint contractures and is constantly wearing orthotics and splints to correct his growth. With our device, we have been successful in supporting his arms vertically and making use out of his trunk rotation. The motors we have integrated have shown high potential in providing functional elbow flexion, however since this movement is new to Reid, we have seen inconsistencies in identifying intentionality and require more testing which is difficult given the current situation with COVID-19.
Meet Our Team Members
Details About Our Project
What is Arthrogryposis?
Arthrogryposis Multiplex Congenita (AMC) is a seriously debilitating condition that renders the patient unable to move their arms or legs due to severe lack of muscle development and joint contractures. The most severe form is congenital amyoplasia. These patients typically require assisted living their entire lives to perform even the most basic of daily functions requiring even the most minimal amount of dexterity in their arms or legs. Approximately 1 in 3000 births are affected by this condition, classifying it as a rare disease. As a result, the needs of this group are commonly overlooked because the development of such a specialized device is too difficult and it is more convenient to serve a larger demographic with a more general device. In short, these patients are in need of a solution that will offer autonomy over basic day-to-day activities.
How Our Device Addresses Reid’s Needs
Affordability, Modularity, and Independence.
Patients with arthrogryposis experience a constant struggle to perform daily tasks. In Reid’s case, he possesses very little active mobility in all his limbs that makes eating, playing with toys, and writing very challenging. Tackling these challenges with an innovative device is further complicated by the high growth rate of children. Any custom-fit product will be rapidly grown out of and if the sizing cannot be easily adjusted, it can be very expensive to update. In addition, our device cannot perform the movements for him. Instead, it needs to assist Reid in his desired action as this will promote his cognitive and physical development. Our device aims at addressing each of these needs to provide Reid with a device that has the best impact on his quality of life from any perspective.
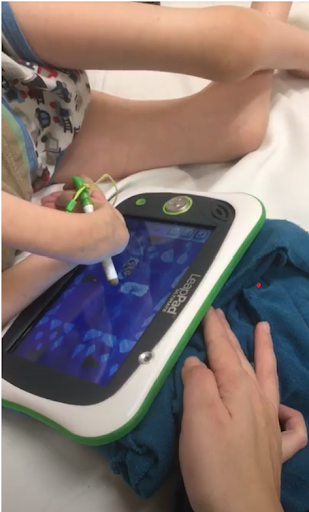


The above photos of Reid depict how he has courageously adapted his way of performing daily tasks to gain independence. It is our goal with the development of the upper body exoskeleton to help facilitate these tasks of eating, playing and writing so that he may lead a happier and more fulfilling life.
Design Details
Modularity
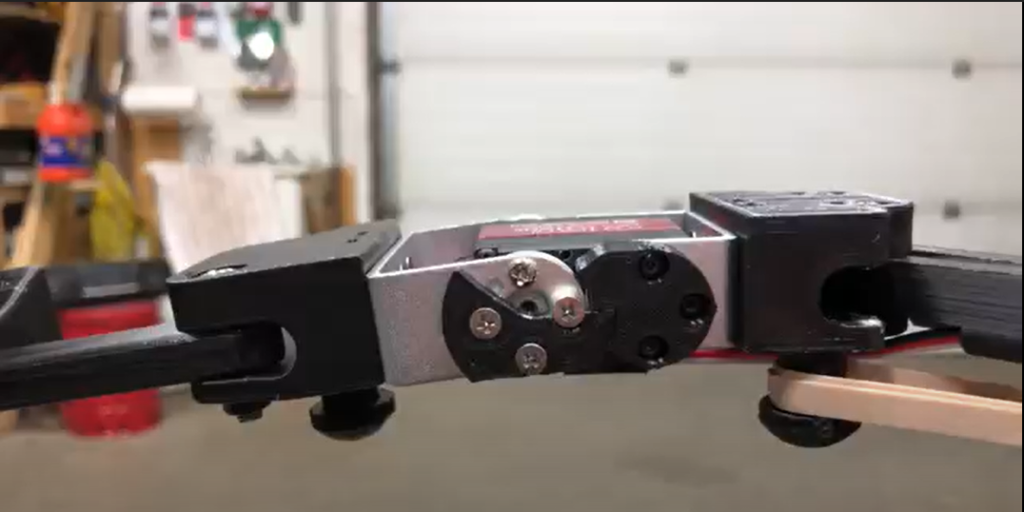
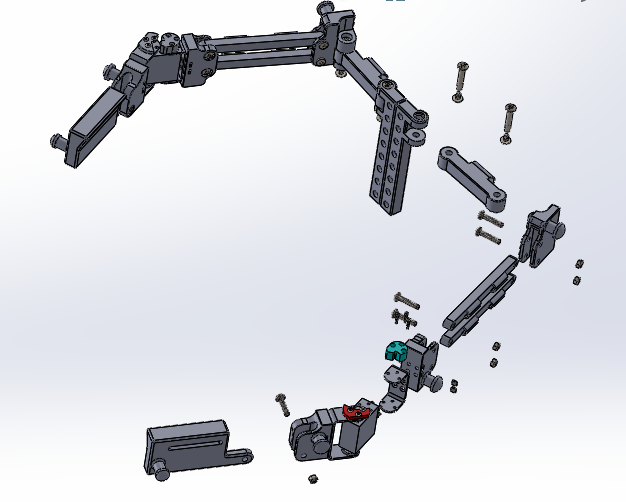
Prosthetics can be quickly outgrown depending on the age of the child, commonly replaced every eight to ten months. Keeping that in mind for our device, we have designed it out of modular 3D printed pieces. The beams along the upper arms and the forearm parts can be easily modified to fit any child, while the joints remain the same. All that would be required is to measure the length from the patient’s shoulder to elbow, and elbow to the wrist. The printing material used is PLA, allowing us to keep costs at a minimum and provide an affordable, modular solution.

Comfort
In designing for a seven-year-old boy, making the exoskeleton lightweight was key to its effectiveness. The final device weighed 1.6 kg which is approximately 5% of Reid’s body weight. To achieve this, we ensured that the materials chosen were mechanically strong enough while not being overly heavy. This design process also ensured that our device was as sleek as possible so that no material was wasted. The custom body orthosis is tailored specifically to Reid’s body, allowing optimal trunk rotation while still being breathable. Additional measures such as padding, making bolts flush with surfaces, and splints have allowed Reid to wear this device for 4 hours long without fatigue.
Autonomy
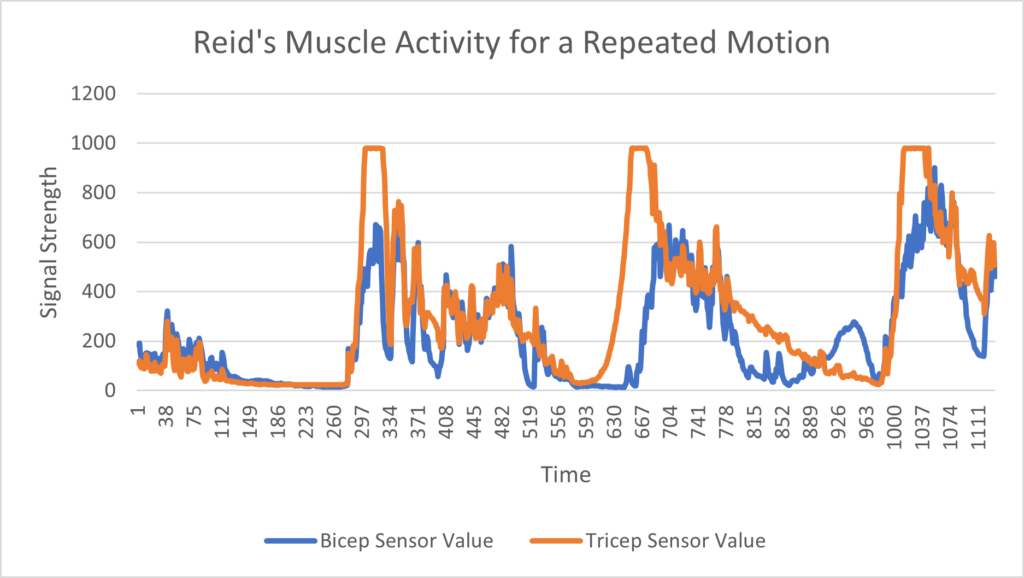
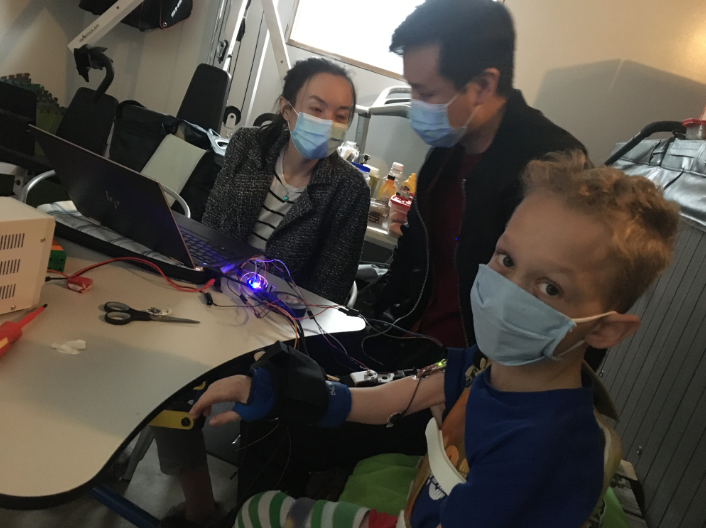
A responsive control system was also important to ensure our device provided Reid with an effective solution. Through the use of myoelectric sensors, we are able to gain real-time input from his muscles to provide a prompt output in the form of motor actuation. Establishing this system is the first step to using the motors to help Reid in daily use, we must now help him learn how to use his muscles to accomplish the desired motion. This has presented us with a challenge as Reid has never used these muscles before to accomplish upper limb movements; practice with the device and further myoelectric data collection is required to optimize this system.
Device and Usability Testing
Rigorous Device Testing

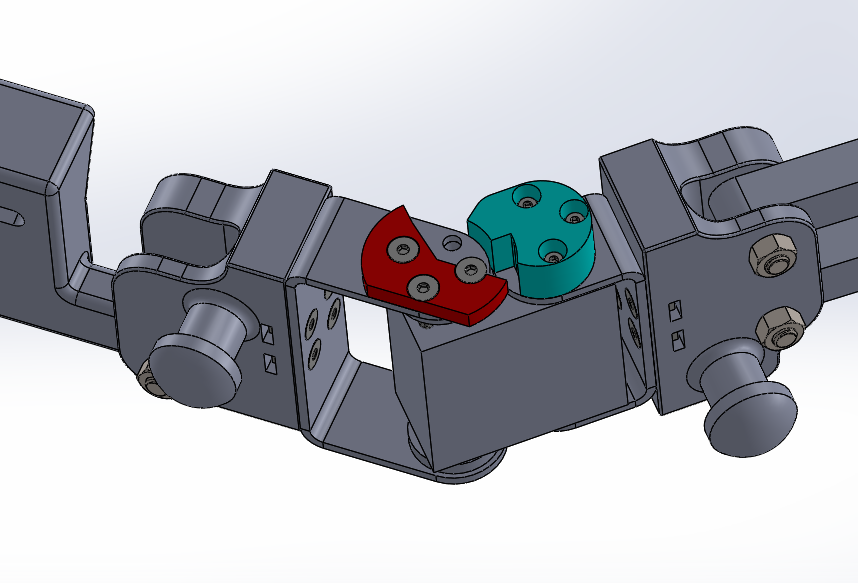

We completed our first validation steps through Solidworks stress simulation, where we were able to validate the loading stresses in our device to make acceptable design choices to avoid buckling or shearing components. Our next step was to analyze the motion of our four bar mechanism using the Solidworks motion analysis tool to ensure Reid would maintain a full range of motion in the device. To ensure the device would be reliable in scenarios where the user is picking up different objects, we tested the integrity of the device with different items that had varying centers of gravity and overall weight. Most recently, we verified the motor and software capability to ensure that the device operates within a useful range of speeds for playing and eating, but also can withstand holding a 500g load on the end of the arm while lifting it vertically. To ensure the safety of the device, we stress tested the mechanical stops by cantilever-loading the arm and allowing the motor to raise and drop weights between its max rotation angle of 110 degrees.
Usability Testing
The goal for this project was to assist Reid in feeding himself, playing with toys, and writing. We designed usability tests around these three main tasks in order to evaluate the device’s performance. As a baseline, Reid was unable to perform any of the three tasks from a seated position without wearing the device. Typically Reid would try to perform these activities lying down, however, he would still require a significant amount of help. Providing him with the ability to complete these tasks while seated would greatly enhance his independence.

Eating
In order to test the effectiveness of the device to assist him in feeding himself, we tasked Reid with bringing a fork with food up to his mouth from a seated position. This activity focused on the simple flexion and extension of the elbow while making him concentrate on flexing to keep the fork by his mouth.

Playing
To evaluate the device’s ability to help Reid in playing with toys, he was tasked to stack blocks from a seated position. This test explored Reid’s motor control planning abilities by adding more complexity to his tasks.
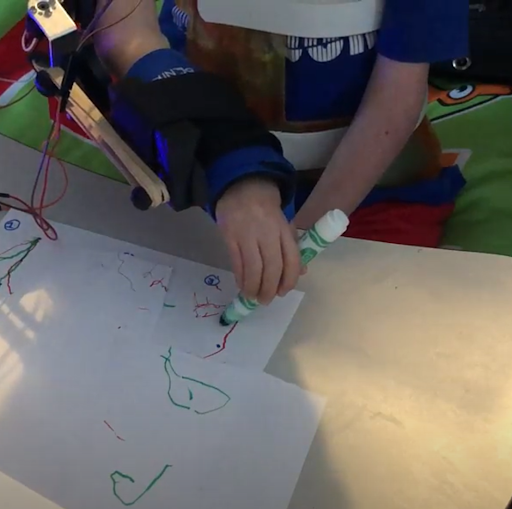
Writing
While testing Reid’s writing capabilities, we focused on the initial steps used for writing in therapy. We began trying simple horizontal/vertical lines and advanced to parallel lines and then shapes. This activity built on his motor planning abilities and challenged his capacity to sequence events. Drawing the simple lines creates an isolated activity to learn, and then parallel lines would build on that skill. Starting in small steps slowly evolves to drawing shapes like a square, then a circle until the ability to write letters is developed.

Modularity
To test the modularity aspect of our device, we adapted our design to Ella, a 13-year-old girl named Ella with merosin deficient muscular dystrophy. We were able to effectively adjust 3D printed beam lengths and body mounting while maintaining the rest of the device constant for Ella, affirming the modularity.
Results

Device testing proved that our design can:
- Successfully sustain Reid’s arms vertically for playing and moving while sitting.
- Support end loads of roughly 600g if lifting directly against gravity.
- Support different shapes of objects with varying centers of gravity using select portions of elastic bands between the arm and elbow, as well as the elbow and forearm.
- Ensure the safety of its user while doing everyday tasks through mechanical and electrical stops.
- Be worn for more than 4 hours due to its low weight (1.6 kg) and skin-sensitive, ergonomic design.
- Be serviced easily since each part can be replaced at a small cost if broken.
- Read the users’ inputs and quantifiably determine intentionality.
From our usability tests, Reid was successful in completing all his tasks, however, we over-estimated his muscular control. We realized a system to help Reid learn to use his muscles will need to be developed. Reid could then gain better control of his device and we can gain a better understanding of his intentionality through the myoelectric sensors. This would be desirable as better control would offer a more natural development for his motor-neuron cortex and expand the usability of this device for more physical development.
Future of Our Device
Overall, we achieved our goal in designing a proof of concept that could help children with disabilities similar to Reid. The device was comfortable, capable of the necessary movements, and strong enough to lift the applied loads. Our goal from this point on will be to develop a prototype that Reid and his family can take home. Part of this process will include improving the control of the device with machine learning and experiment with using multiple muscle sensors. The muscle sensor electrodes will be integrated into an armband for easy implementation and reusability. As we finalize the device, the electrical design and battery system will be moved to a printed circuit board and contained in a pack to be mounted to the back of the orthosis.
Partners and mentors

We would like to extend our gratitude to everyone involved in our project. First and foremost, we would like to thank Reid, his mother Rebecca, and the rest of the Hintz family for their patience and time taken to work with our team. A special thank you is also extended to all the people within the organizations that have helped us in our endeavour:
- Dr. Elaine Joughin, Christina Yu, Dr. Vanessa D’Souza, Stacey Brown, and Judith Mair at the Alberta Children’s Hospital for their expertise and assistance.
- Fritz Peyerl, Jim Monk, and everyone else at the Tetra Society of Calgary for their mentorship and facilities.
- Bob and Faye White of Action 3D Printing for sponsoring our project as well as their excellent quality and service for 3D Printing.
- Kira and Ella Dixon for their time and cooperation.
- Dr. Laura Curiel as our Academic Advisor.
Without these people our project would not be where it is today, so from the bottom of our hearts, thank you!
Our Photo Gallery