Project Category: Multidisciplinary
Dynamic Dispensing: The Future of Rapid Microfluidics Prototyping is Now
Join Us Live
About Our Project
This project started with two main objectives. The first was designing and constructing a system capable of dispensing micro-volumes of SU-8 (a negative photoresist) in a micro-grid pattern. The second goal was to make the same system capable of printing with polydimethylsiloxane (PDMS) – a silicone elastomer. To protect the privacy of the project sponsor’s intellectual property, the first objective will not be displayed here in detail.
The second objective enables rapid prototyping of microfluidics devices through an additive manufacturing process. Microfluidics devices are commonly made from PDMS but require an expensive mold specific to the device, which adds cost and time to the development of novel microfluidics devices. Our project solves this by providing a system that does away with the need for a mold, and that can rapidly prototype microfluidics devices, which have broad applications ranging from lab-on-a-chip systems for DNA analysis to rapid test kits for diseases like COVID-19.
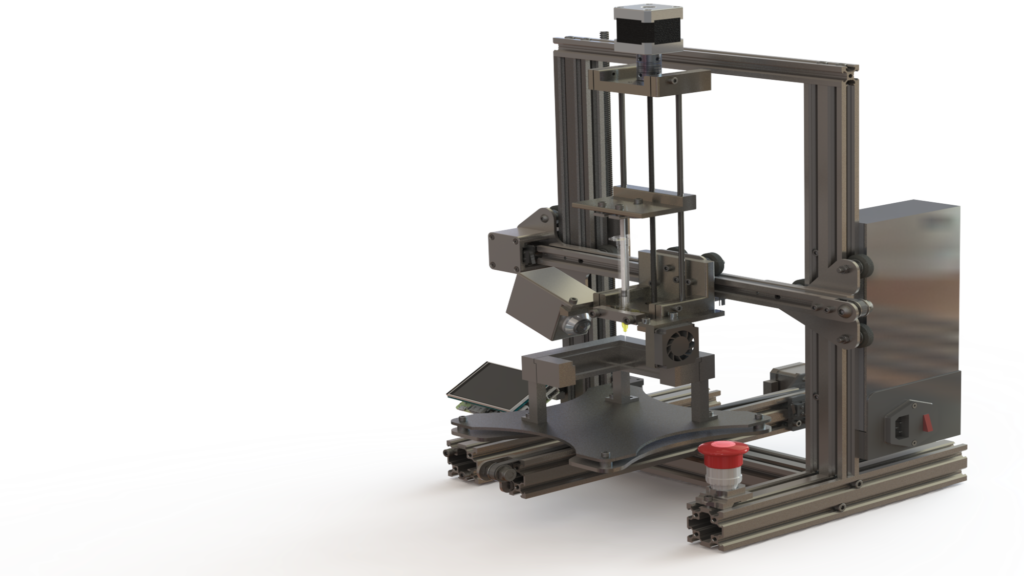
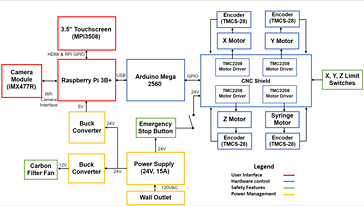
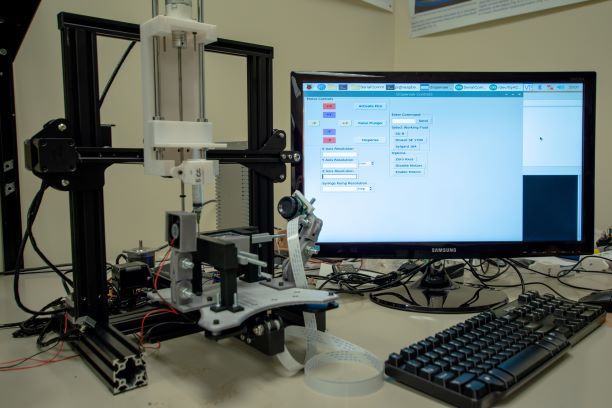
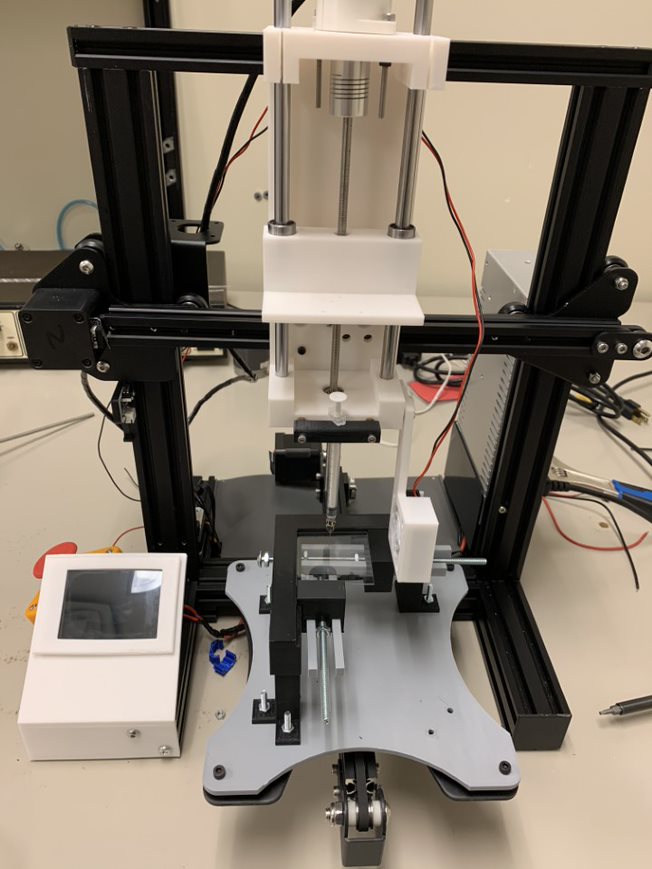
Our team designed and built a dynamic dispensing system that offers precise triaxial movement, meticulous control on dispensed fluid quantity through a motor-driven syringe pump, as well as automatic dispensing and printing features. Our system is capable of dispensing SU8, PDMS or other silicone elastomers onto a variety of different substrates through our universal workpiece fixture and can be easily programmed to construct custom profiles for each specific workpiece.
The microfluidics industry is projected to reach $30 billion by 2027. Our system is the first to allow for the rapid prototyping of microfluidics devices which are typically fabricated from non-Newtonian liquid polymers.
Details About Our Design
PRODUCT OVERVIEW
HOW OUR DESIGN ADDRESSES PRACTICAL ISSUES
Our project was designed to perform two specific tasks that are used in our project sponsor’s (Neuraura Biotech) proprietary neurosensor fabrication process. A secondary application of our project is that it can be used for rapid prototyping microfluidics devices. Some applications of Neuraura’s neurosensors are: measuring neuronal action potentials, observing cell-to-cell communication, stimulating areas of the brain, capturing appropriate signals for a brain-machine interface, and much more. These all help improve the quality of life for millions of individuals worldwide who are affected by brain diseases. Microfluidics, on the other hand, is a broad sector best known for the plethora of “lab-on-a-chip” devices that we use today for things like DNA analysis, drug delivery, and rapid test kits. Conventional lab-on-a-chip devices made from PDMS require expensive molds for each specific design, which makes prototyping novel devices time and cost intensive. With our system, these challenges can be eliminated.
WHAT MAKES OUR DESIGN INNOVATIVE
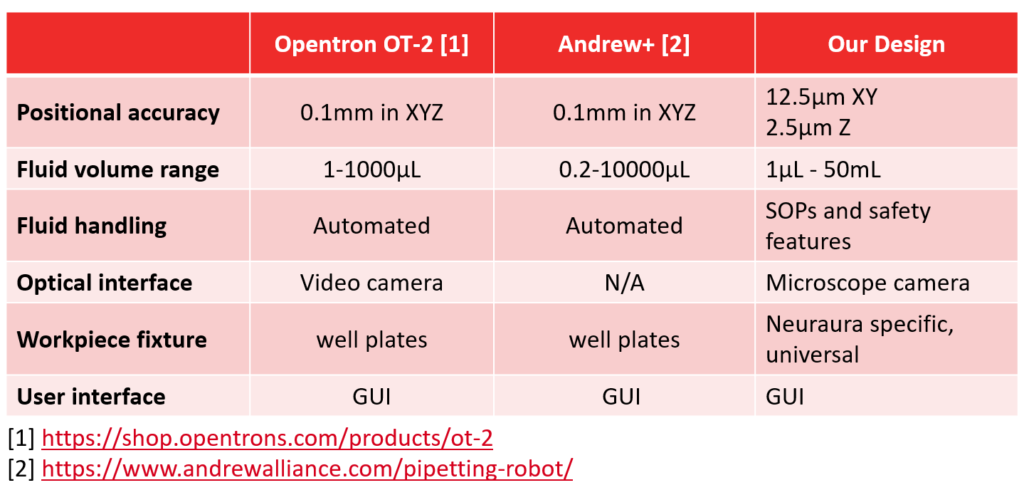
Our system is the only one in the dispensing robot market that can dispense photoresists such as SU-8 in this drop-by-drop manner. Compared to other dispensing systems on the market, it offers 2-2.5 times the positional control and as much as 20-100 times better dispensed quantity control. These advancements are further complemented by its ability to handle and coat multiple geometries simply by creating the appropriate movement/dispensing profile for the structure. Furthermore, the technique used to dispense SU-8 in this manner is a novel concept where the industry standard for SU-8 application is spin coating the material onto a substrate.
WHAT MAKES OUR DESIGN SOLUTION EFFECTIVE
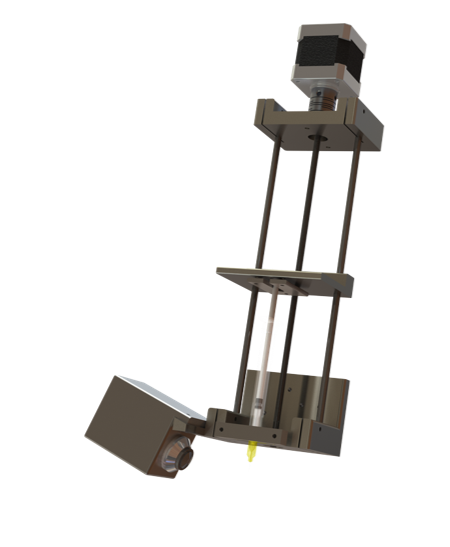
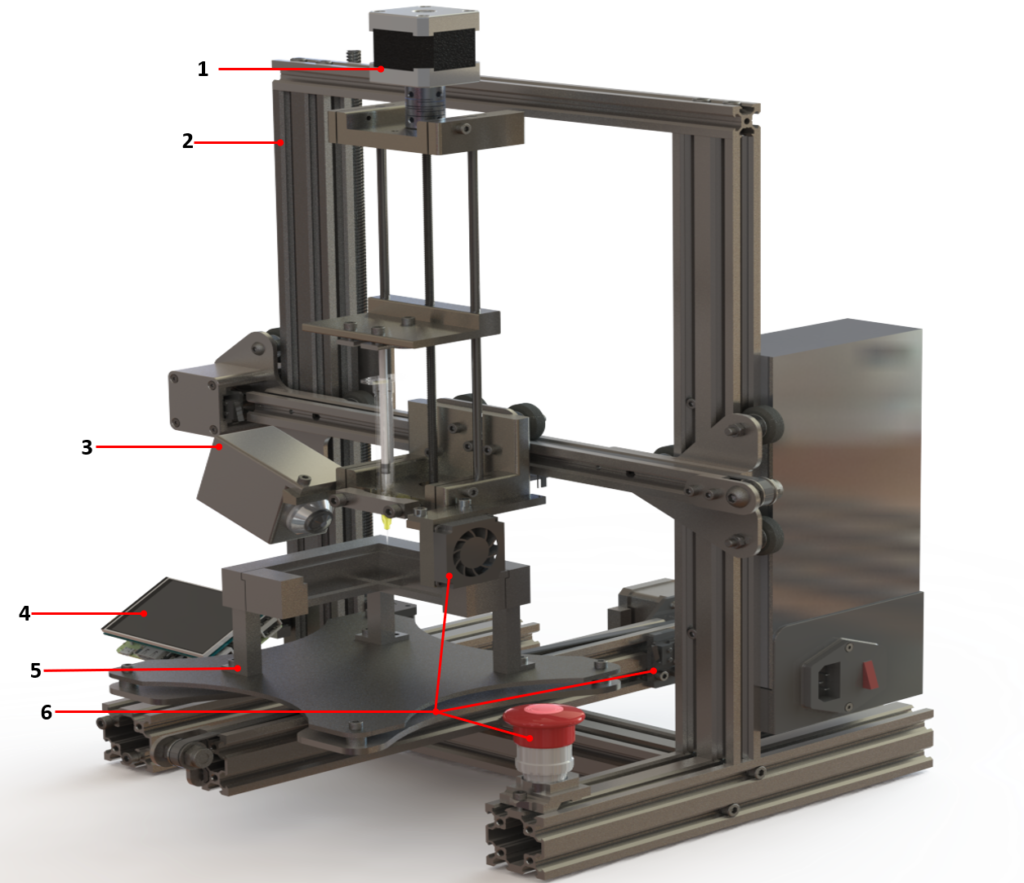
- A motor-driven syringe pump uses linear actuation to ensure consistent flow rates, and micro-stepping allows the system to dispense precise quantities of loaded fluids. At the same time, encoders constantly monitor any deviation in dispensing profile.
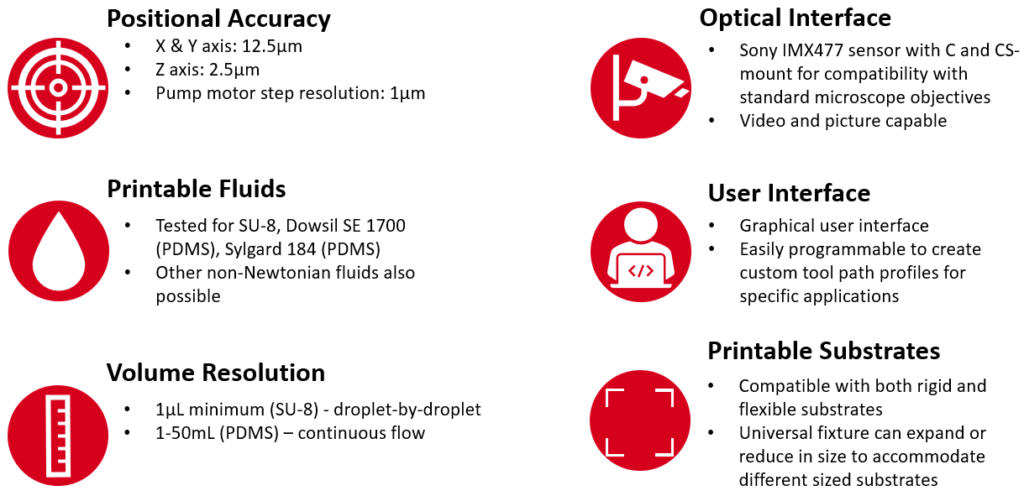
- Positioning System offers point pinpoint accuracy boasting exceptional positional accuracy and the ability to tread intricate paths at the microscopic level. X and Y-axis offers a 12.5 µm travel resolution with Z axis movement improving it further to 2.5 µm
- The microscope camera shows a live feed of the process, allowing the operator to track progress/quality in real-time.
- The 3.5″ LCD touchscreen can work in standalone mode to display the GUI, or it can output video to an external monitor for programming and debugging purposes. This allows for seamless interaction between the user and the machine while providing an option to switch between autonomous/manual control.
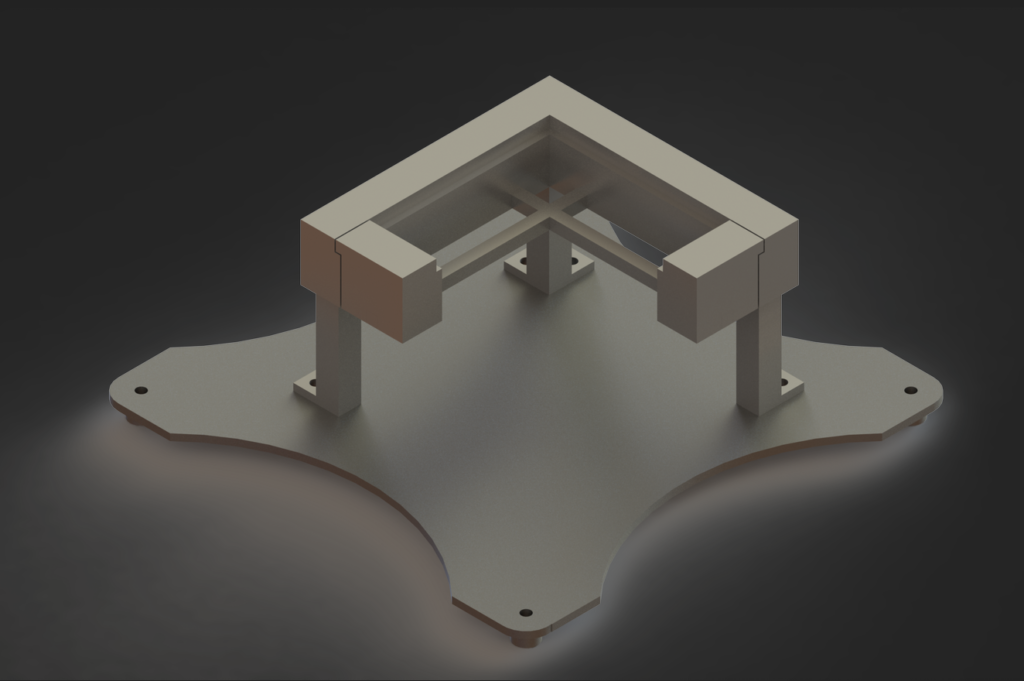
- Universal workpiece fixture can accommodate a wide array of rectangular substrates while supporting both rigid and flexible devices, unlike traditional pipetting robots limited to standard well plate sizes.
- Finally, the included safety features such as the emergency stop button and carbon filter fan ensure the user is actively protected from hazardous fumes during operation and can immediately halt the system if needed.
HOW WE VALIDATED OUR DESIGN SOLUTION
During the fall semester all our efforts were focused on planning and designing a feasible solution capable of printing non Newtonian liquid polymers. The system underwent rigorous testing to ensure the design met the standards agreed upon with the project sponsor in the product acceptance criteria. This work carried over into the winter semester, where we focused our efforts on building, testing, and validating our design. The testing itself was divided into 3 phases to minimize downtime, effectively address issues, and meet the promised standards. Testing results demonstrated our system’s ability to cut down the processing time and execute the tasks specified by the project sponsor consistently and accurately, per the tolerances agreed upon in the acceptance criteria. Our system is also cost-effective, and about 3-10 times cheaper than other market alternatives that offer lower accuracy and are limited in terms of the materials they can use. Check out the video above to see our design in action!
FEASIBILITY OF OUR DESIGN SOLUTION
The entire system was designed and constructed during the quarantine period, which imposed meeting team restrictions and delayed procurement timelines. Regardless, we managed to design, build, test, and validate our system effectively. Therefore, the machine could be efficiently reproduced in a professional setting using the models, specifications, and directions the team has provided. Creating and operating multiple systems in tandem will also allow the sponsor to expand this system into an assembly line where each system could be responsible for a dedicated task (i.e. 1 system for SU-8 printing, 1 system for PDMS printing), improving the manufacturing efficiency. This, in conjunction with the SOPs provided, will allow even new users to familiarize themselves with the machine operation where they could then follow simple instructions to coat or create the required item. Overall, the feasibility of our solution was demonstrated by the ability to execute the tasks required by the project sponsor to the standard agreed upon in the product acceptance criteria at the start of the project.
Meet Our Team Members




Man Chun Chung
Mechanical Engineering
Bradley Lawson
Civil Engineering
Suchet Mangat
Mechanical Engineering
Kazim Haider
Mechanical Engineering
Shiyuan Song
Energy Engineering
Partners and Mentors
Neuraura Biotech Inc: Project Sponsor
Neuraura was founded to improve the lives of billions of people suffering from neurological, psychiatric and sensory conditions through the development of fully implantable medical devices with closed-loop recording and stimulation, also known as neuromodulation. Visit their website below for more details!

Dr. Colin Dalton: Academic Advisor
Dr. Dalton is an Assistant Professor in the Department of Electrical and Computer Engineering. We would like to thank him, his students, and his lab for their recommendations and resources over the course of this project.
Our Photo Gallery